SLAM, Navigation
ROS2 기반의 지도생성, 로봇제어, Nav2 파라미터 튜닝
상세설명
ROS2 기반의 실내 자율주행 SLAM, Navigation 적용을 위한 모바일로봇 테스트.TF를 비롯한 센서퓨전 검증, SLAM 지도 결과물 확인, 최적 Navigation 을 위한 파라미터 수정
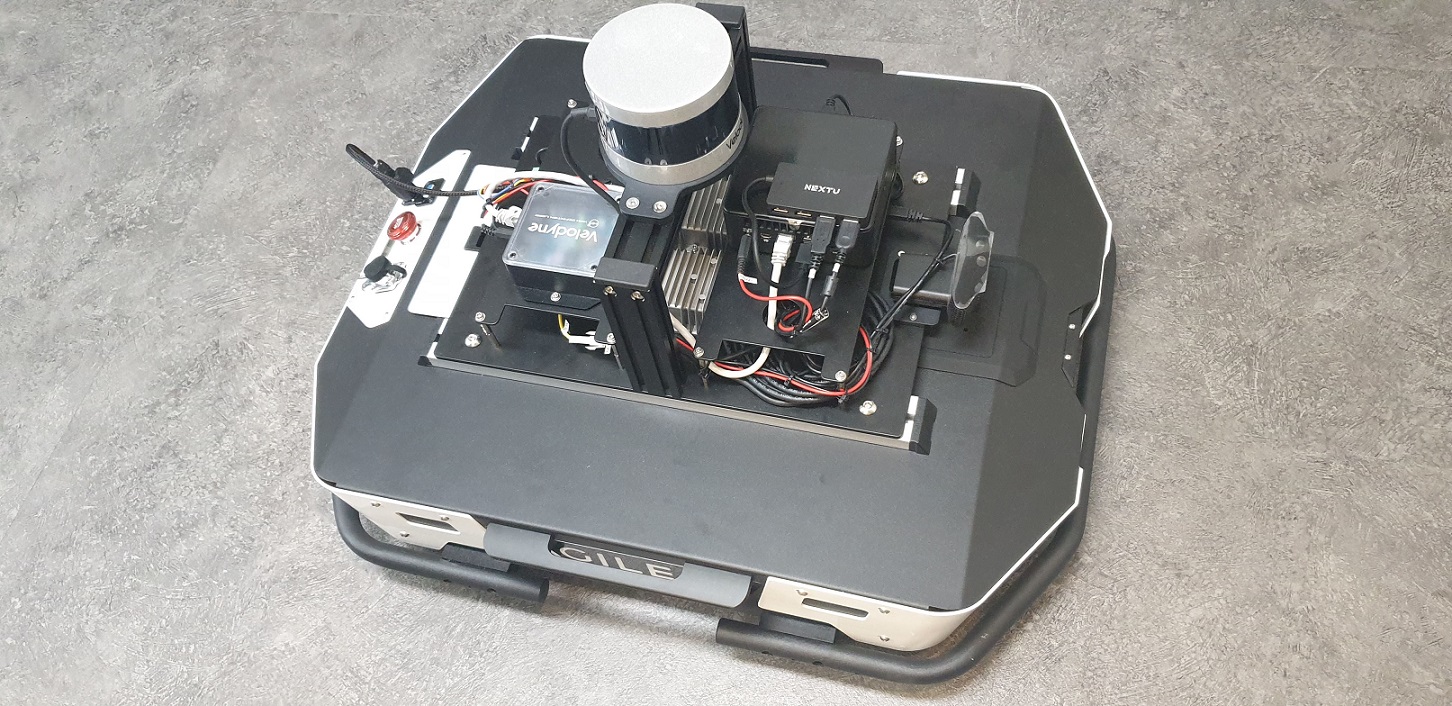 [Tracer] 공장 물류 로봇.
[Tracer] 공장 물류 로봇.
 [Tracer] PC, Lidar, IMU, Camera 부착 .
[Tracer] PC, Lidar, IMU, Camera 부착 .
Gmapping, Slam toolbox / SLAM 패키지 적용
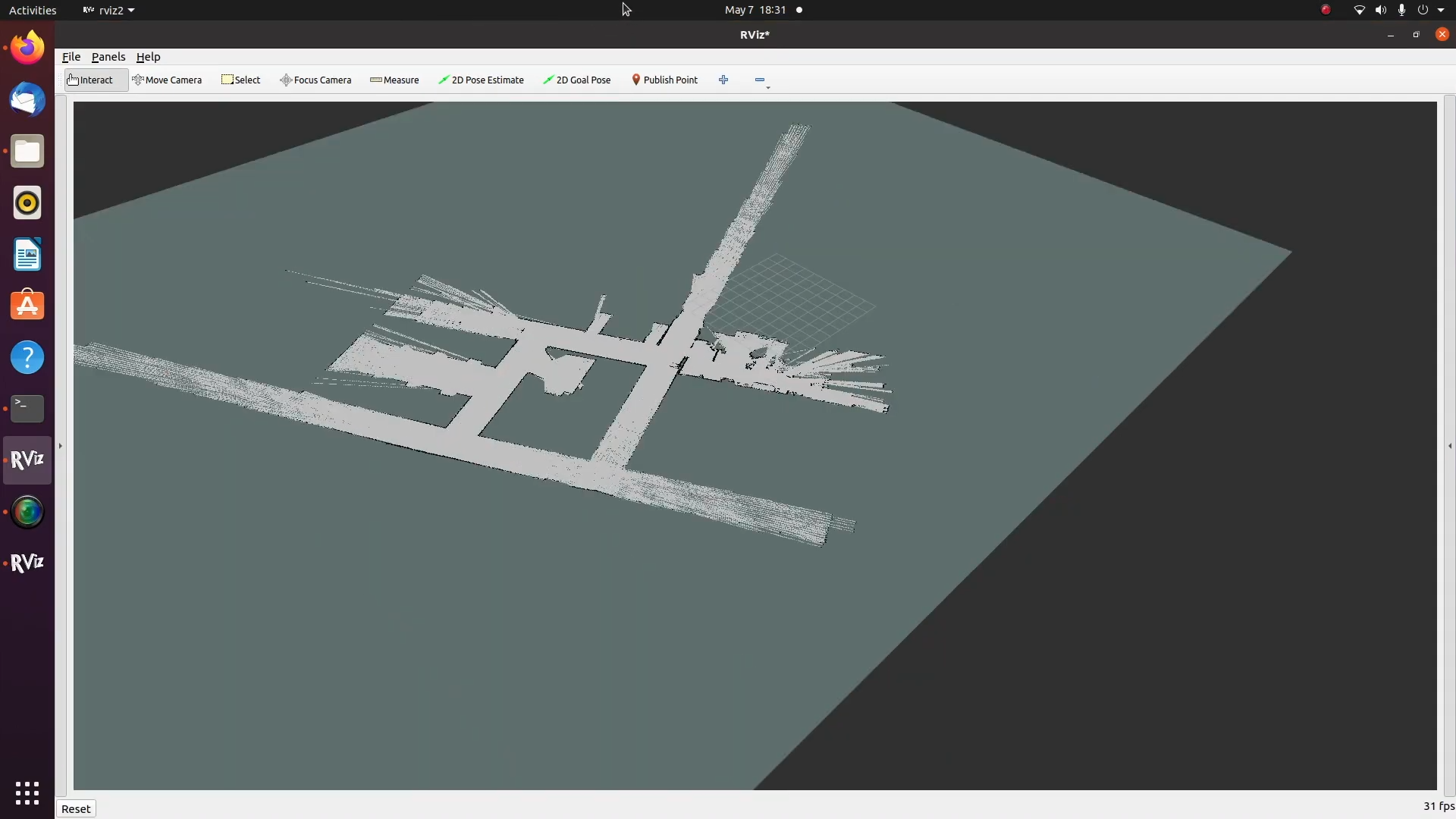 [mapping] gmapping 패키지를 사용하여 지도생성.ROS2 환경에서 Slam 패키지로 많이 사용되는 slam toolbox 를 사용하여 지도생성
[mapping] gmapping 패키지를 사용하여 지도생성.ROS2 환경에서 Slam 패키지로 많이 사용되는 slam toolbox 를 사용하여 지도생성
최종 맵 파일
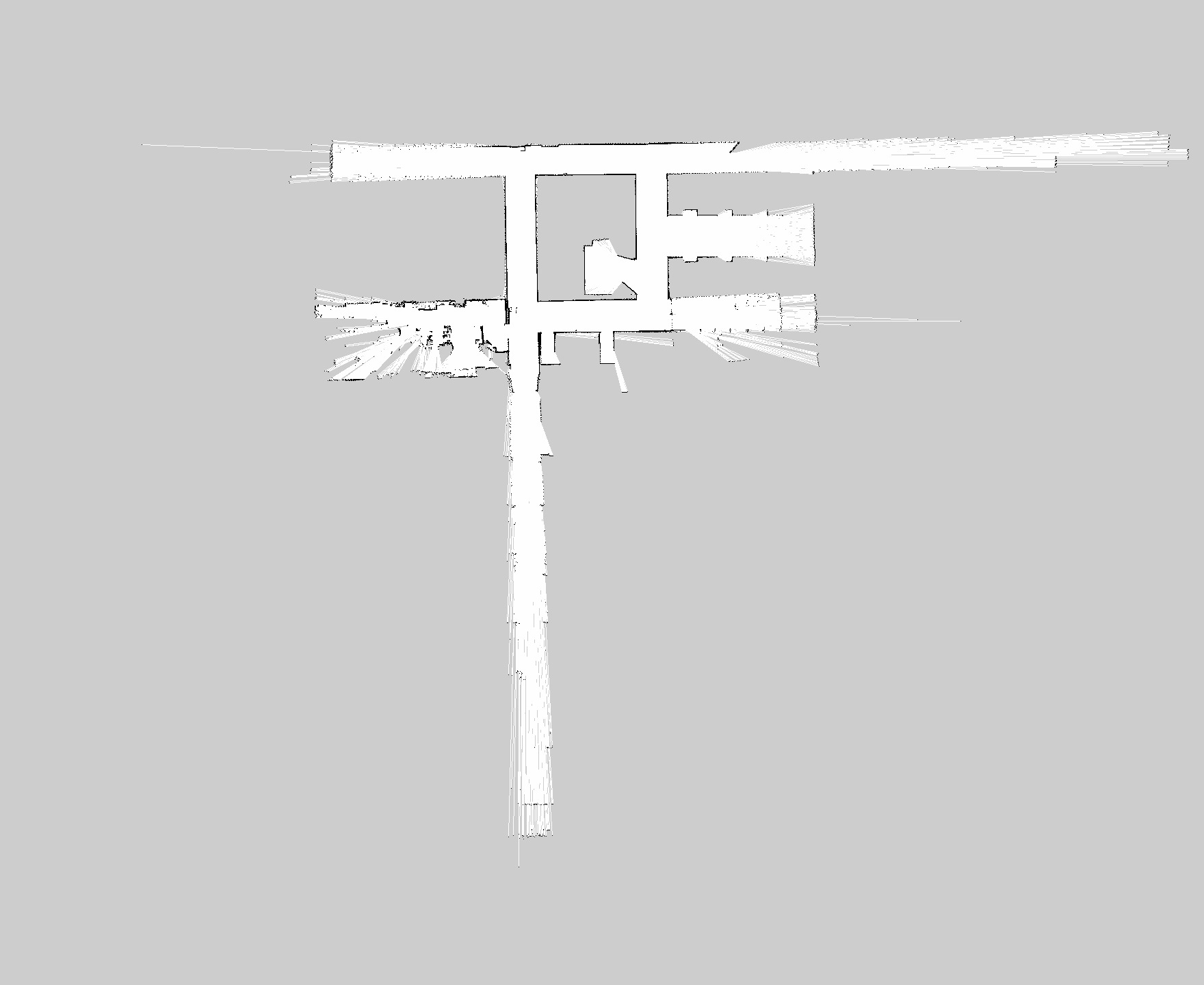 [pgm 파일] 최종 지도 파일 pgm yaml.지도를 생성하고 최종 지도파일을 저장하여 활용 pgm, yaml 파일
[pgm 파일] 최종 지도 파일 pgm yaml.지도를 생성하고 최종 지도파일을 저장하여 활용 pgm, yaml 파일
rviz 확인

 [Novatel] Novatel PIM222A Dual antenna 사용중.
[Novatel] Novatel PIM222A Dual antenna 사용중. [MBC] MRP-2000v2 Broadcast rtk 제품 .
[MBC] MRP-2000v2 Broadcast rtk 제품 . [INS heading] .High end GPS(INS) 제품 군의 Novatel INS 의 보급형 PIM222A 기반의 제품으로 Dual antenna 를 사용하여 NMEA PASHR 값을 사용 진북 Heading 값 및 20hz 업데이트 속도 테스트
[INS heading] .High end GPS(INS) 제품 군의 Novatel INS 의 보급형 PIM222A 기반의 제품으로 Dual antenna 를 사용하여 NMEA PASHR 값을 사용 진북 Heading 값 및 20hz 업데이트 속도 테스트 [Map] Satellite image map waypoint & stop points.다양한...
[Map] Satellite image map waypoint & stop points.다양한... [실내 트랙] 교차로가 있는 기본 원형트랙.
[실내 트랙] 교차로가 있는 기본 원형트랙. [추가 미션] 긴급정지/ 이미지처리 등의 미션을 하기위한 동적장애물과 신호등 .
[추가 미션] 긴급정지/ 이미지처리 등의 미션을 하기위한 동적장애물과 신호등 .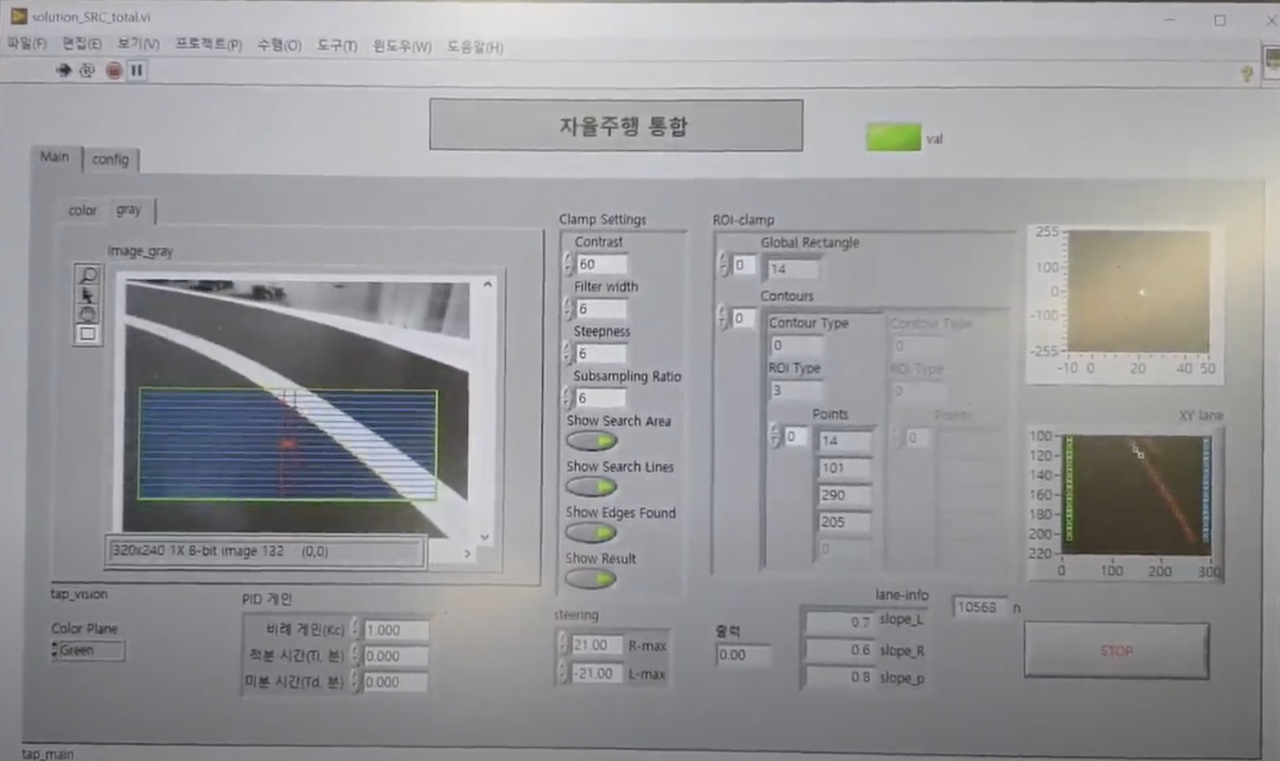 [image processing] Vision toolkit 을 사용하여 image processing 적용.다양한 비젼 image processing 중 간단한 grayscale 추출 후 흑/백 이미지의 threshold 를 설정하여 2개의 차선의 폭을 계산하고 추가로 2개 혹은 1개의 차선의 기울기를 계산하여 값을 조향제어에 반영
[image processing] Vision toolkit 을 사용하여 image processing 적용.다양한 비젼 image processing 중 간단한 grayscale 추출 후 흑/백 이미지의 threshold 를 설정하여 2개의 차선의 폭을 계산하고 추가로 2개 혹은 1개의 차선의 기울기를 계산하여 값을 조향제어에 반영 [Moving Obstacle] 횡당보도에서 사람이 건너가는 상황모사를 위한 동적 장애물.이동하는 물체를 인식하고 긴급정지하는 기능을 검증하기...
[Moving Obstacle] 횡당보도에서 사람이 건너가는 상황모사를 위한 동적 장애물.이동하는 물체를 인식하고 긴급정지하는 기능을 검증하기...