SLAM, Navigation
ROS2 기반의 지도생성, 로봇제어, Nav2 파라미터 튜닝
상세설명
ROS2 기반의 실내 자율주행 SLAM, Navigation 적용을 위한 모바일로봇 테스트.TF를 비롯한 센서퓨전 검증, SLAM 지도 결과물 확인, 최적 Navigation 을 위한 파라미터 수정
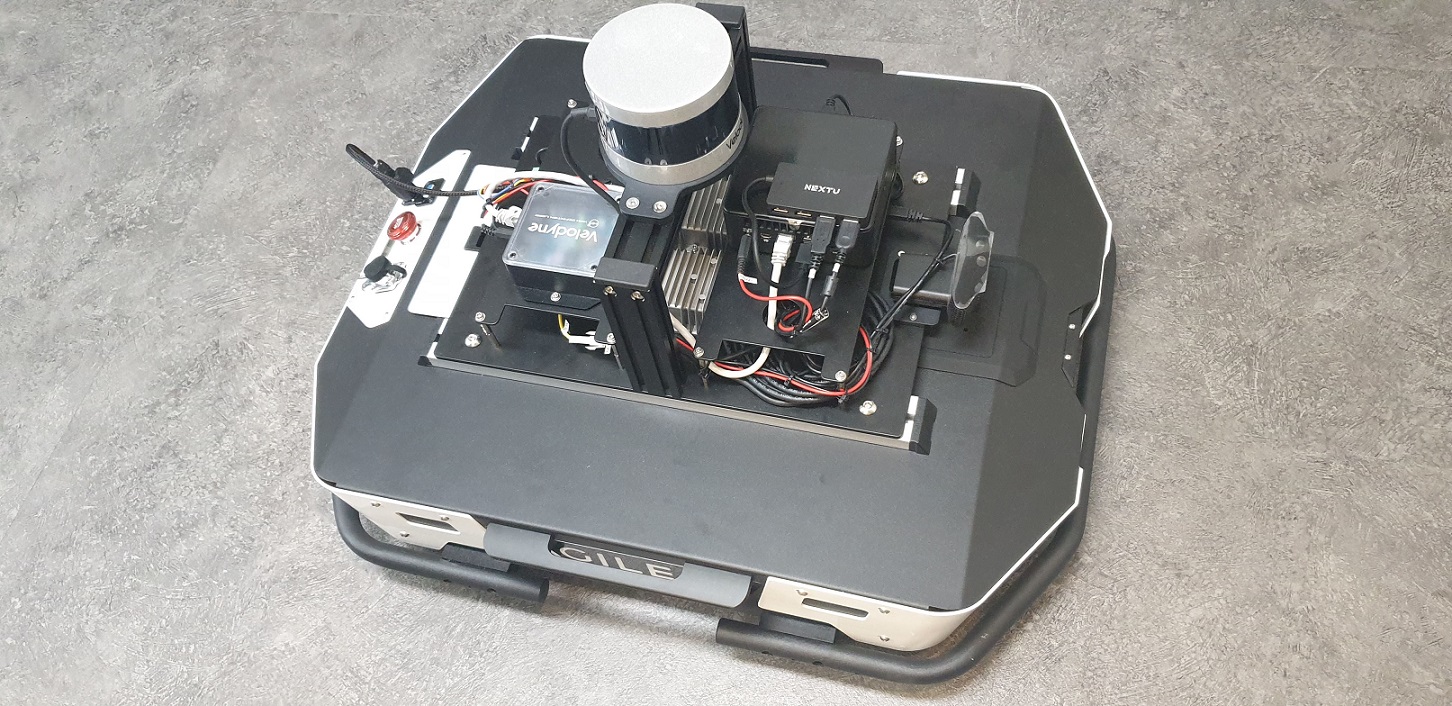 [Tracer] 공장 물류 로봇.
[Tracer] 공장 물류 로봇.
 [Tracer] PC, Lidar, IMU, Camera 부착 .
[Tracer] PC, Lidar, IMU, Camera 부착 .
Gmapping, Slam toolbox / SLAM 패키지 적용
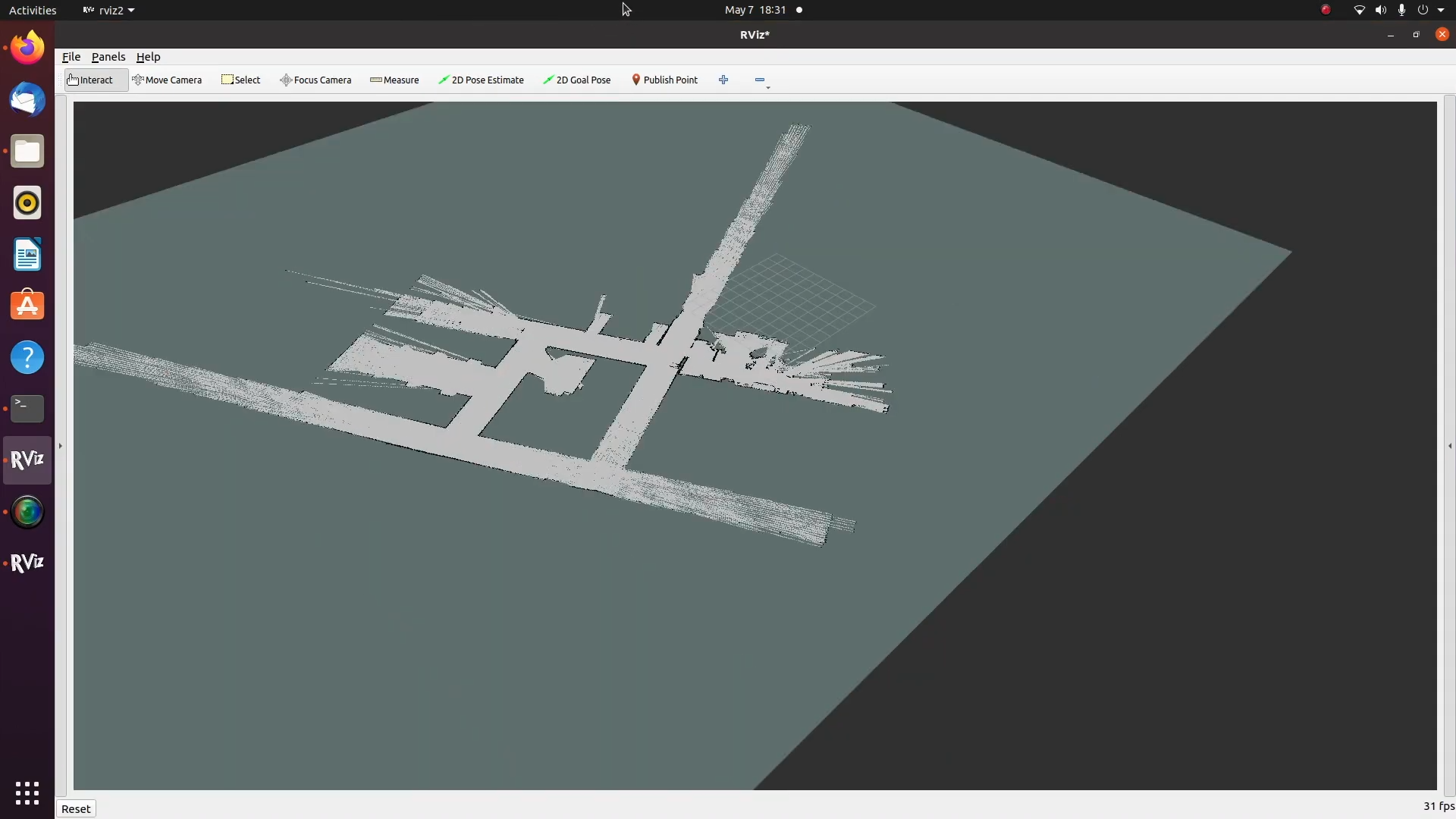 [mapping] gmapping 패키지를 사용하여 지도생성.ROS2 환경에서 Slam 패키지로 많이 사용되는 slam toolbox 를 사용하여 지도생성
[mapping] gmapping 패키지를 사용하여 지도생성.ROS2 환경에서 Slam 패키지로 많이 사용되는 slam toolbox 를 사용하여 지도생성
최종 맵 파일
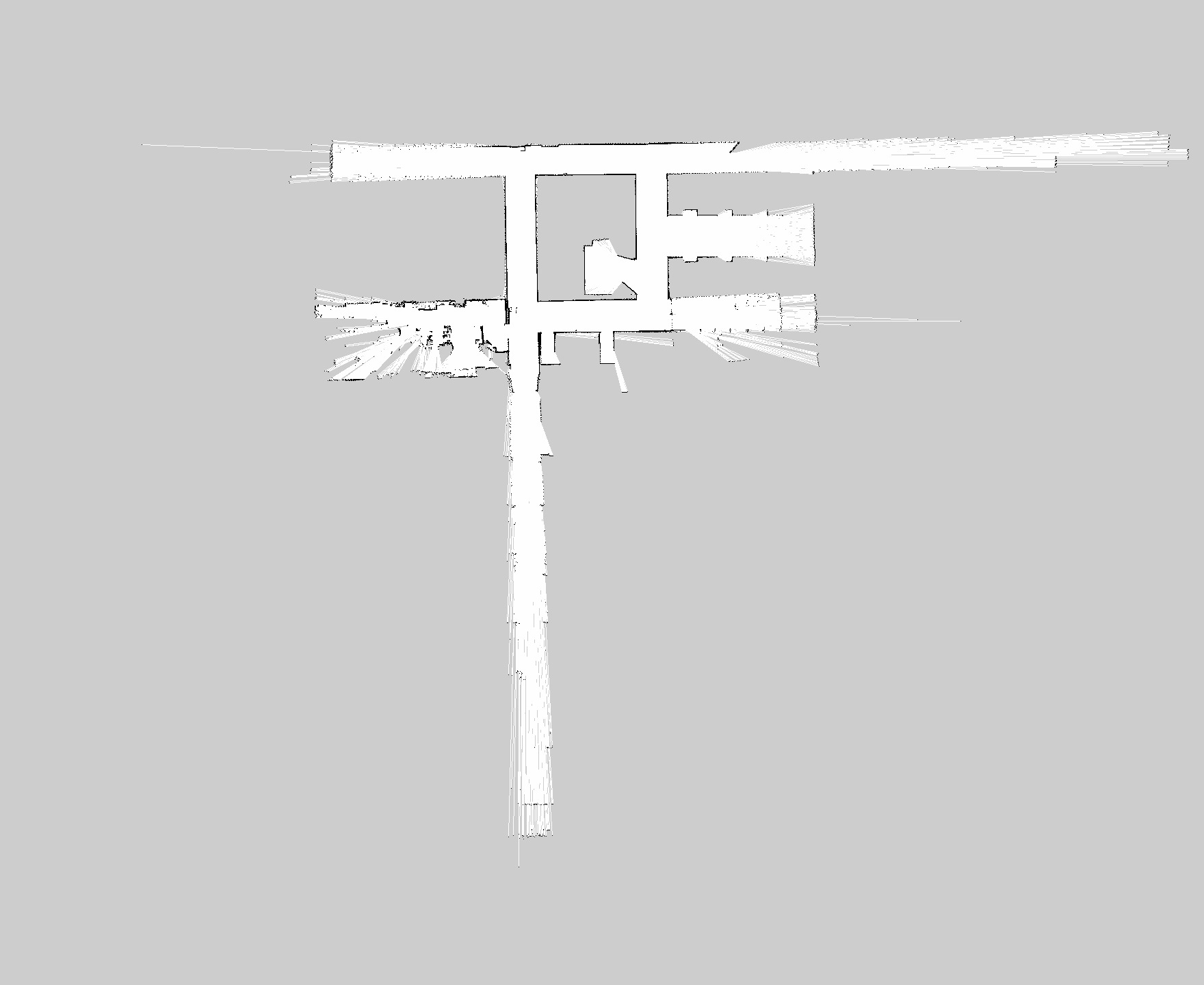 [pgm 파일] 최종 지도 파일 pgm yaml.지도를 생성하고 최종 지도파일을 저장하여 활용 pgm, yaml 파일
[pgm 파일] 최종 지도 파일 pgm yaml.지도를 생성하고 최종 지도파일을 저장하여 활용 pgm, yaml 파일
rviz 확인

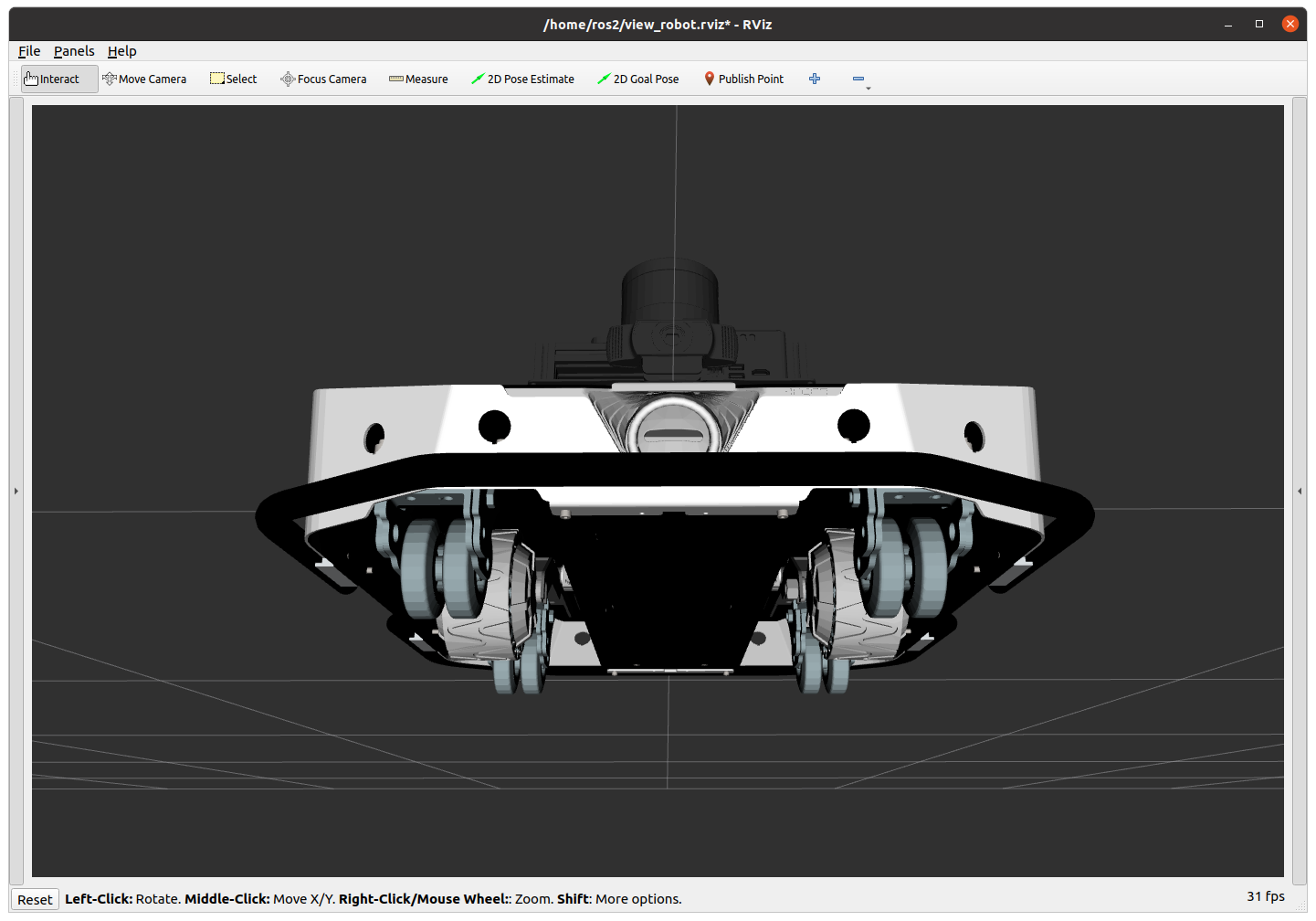 [로봇모형] 3d 로봇 모형.
urdf 파일 형태의 로봇 3D 형상파일 로딩
[로봇모형] 3d 로봇 모형.
urdf 파일 형태의 로봇 3D 형상파일 로딩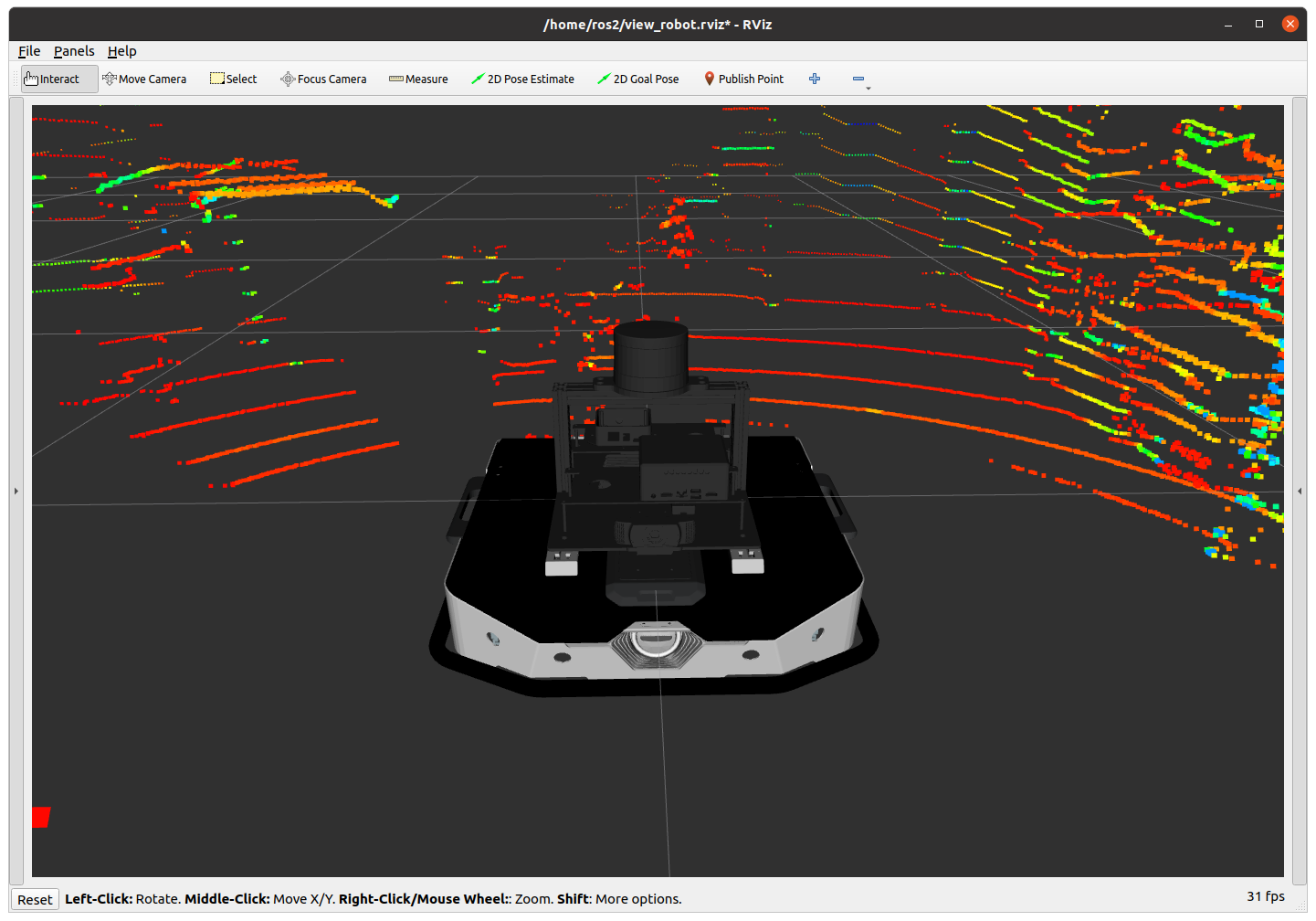 [센서사진] Lidar, IMU TF, camera image visualization .
[센서사진] Lidar, IMU TF, camera image visualization . [충전] 전용 충전기를 사용하여 로봇 충전.
[충전] 전용 충전기를 사용하여 로봇 충전.
Comments