차선인식 테스트
차선인식 테스트 후기
상세설명
자율주행을 위한 차선인식 적용 이미지프로세싱 주행알고리즘 반영.
 [실내 트랙] 교차로가 있는 기본 원형트랙.
[실내 트랙] 교차로가 있는 기본 원형트랙. [추가 미션] 긴급정지/ 이미지처리 등의 미션을 하기위한 동적장애물과 신호등 .
[추가 미션] 긴급정지/ 이미지처리 등의 미션을 하기위한 동적장애물과 신호등 .
Grayscale 이미지 추출, Binary convertion, 기울기 및 폭 계산 (Clamp)
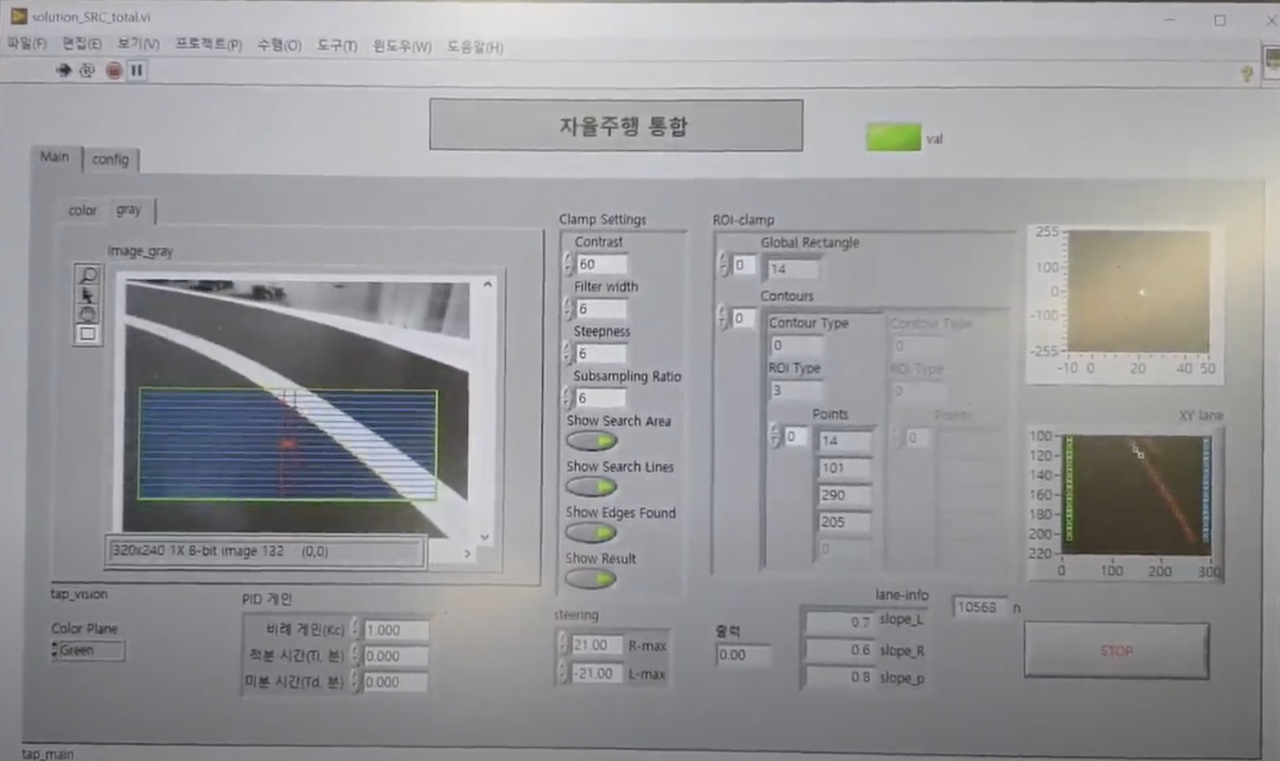 [image processing] Vision toolkit 을 사용하여 image processing 적용.다양한 비젼 image processing 중 간단한 grayscale 추출 후 흑/백 이미지의 threshold 를 설정하여 2개의 차선의 폭을 계산하고 추가로 2개 혹은 1개의 차선의 기울기를 계산하여 값을 조향제어에 반영
[image processing] Vision toolkit 을 사용하여 image processing 적용.다양한 비젼 image processing 중 간단한 grayscale 추출 후 흑/백 이미지의 threshold 를 설정하여 2개의 차선의 폭을 계산하고 추가로 2개 혹은 1개의 차선의 기울기를 계산하여 값을 조향제어에 반영
동적장애물 적용
 [Moving Obstacle] 횡당보도에서 사람이 건너가는 상황모사를 위한 동적 장애물.이동하는 물체를 인식하고 긴급정지하는 기능을 검증하기... read more
[Moving Obstacle] 횡당보도에서 사람이 건너가는 상황모사를 위한 동적 장애물.이동하는 물체를 인식하고 긴급정지하는 기능을 검증하기... read more
 [모형신호등] 자동/수동 모드로 구성하여 불이들어오도록 구성.
추가적인 카메라 이미지 처리를 위해 신호등의 색/모양 등을 검출하여 반영할 수 있도록 구성
[모형신호등] 자동/수동 모드로 구성하여 불이들어오도록 구성.
추가적인 카메라 이미지 처리를 위해 신호등의 색/모양 등을 검출하여 반영할 수 있도록 구성 [적용사진] 반복적으로 녹색/황색/적색 이 켜지도록 구성.
[적용사진] 반복적으로 녹색/황색/적색 이 켜지도록 구성.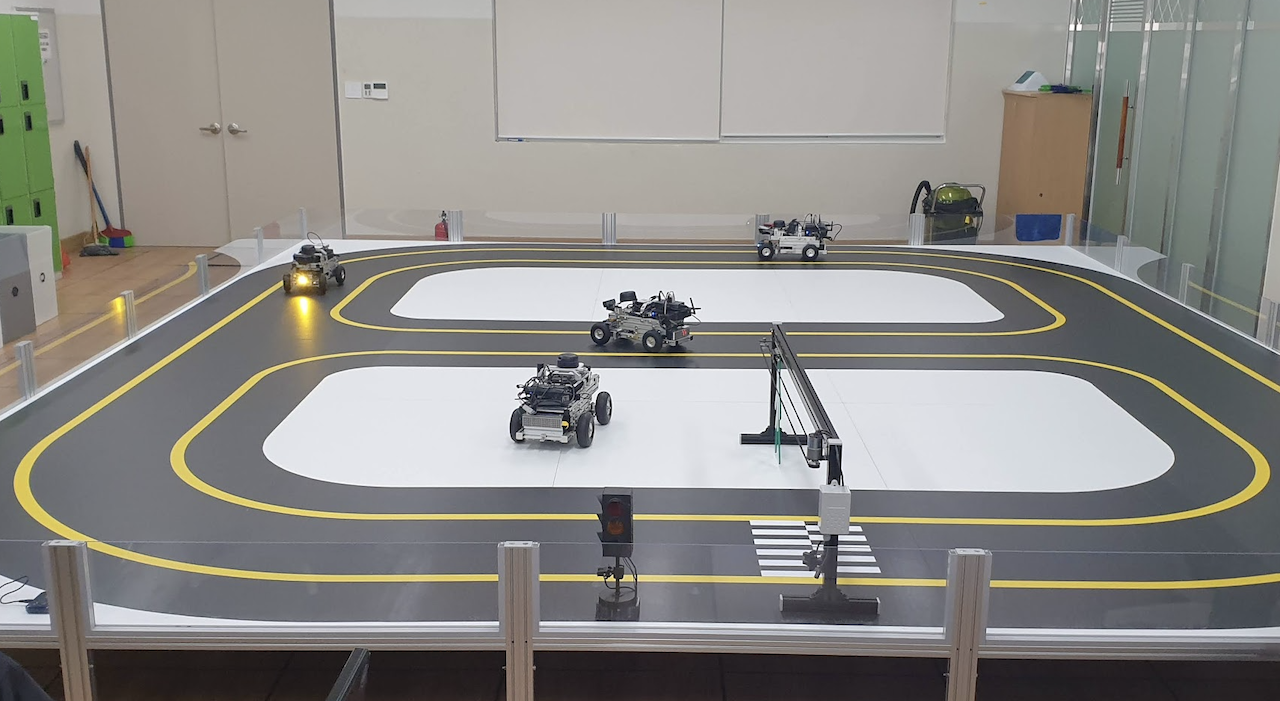 [군집 주행] 동시에 여러대의 차량이 이동하면서 충돌방지 및 안정적 운행 테스트.
[군집 주행] 동시에 여러대의 차량이 이동하면서 충돌방지 및 안정적 운행 테스트.
Comments