IMU 테스트
다양한 제조사의 IMU(AHRS) 제품에 대한 비교 테스트 후기
XSENS MTi-630, VectorNav VN-100, SBG Ellipse-D, Ntrex MW-AHRSv1
상세설명
자율주행 AGV 에 적용되는 IMU(AHRS) 는 AGV 의 Heading 값을 측정 및 적용하기 위해 사용합니다.
다양한 값들이 있지만 (Accelerometer, Magnitude, yaw/pitch/roll) 그 중에서 yaw 값을 위주로 heading 값으로 적용하여 사용합니다.
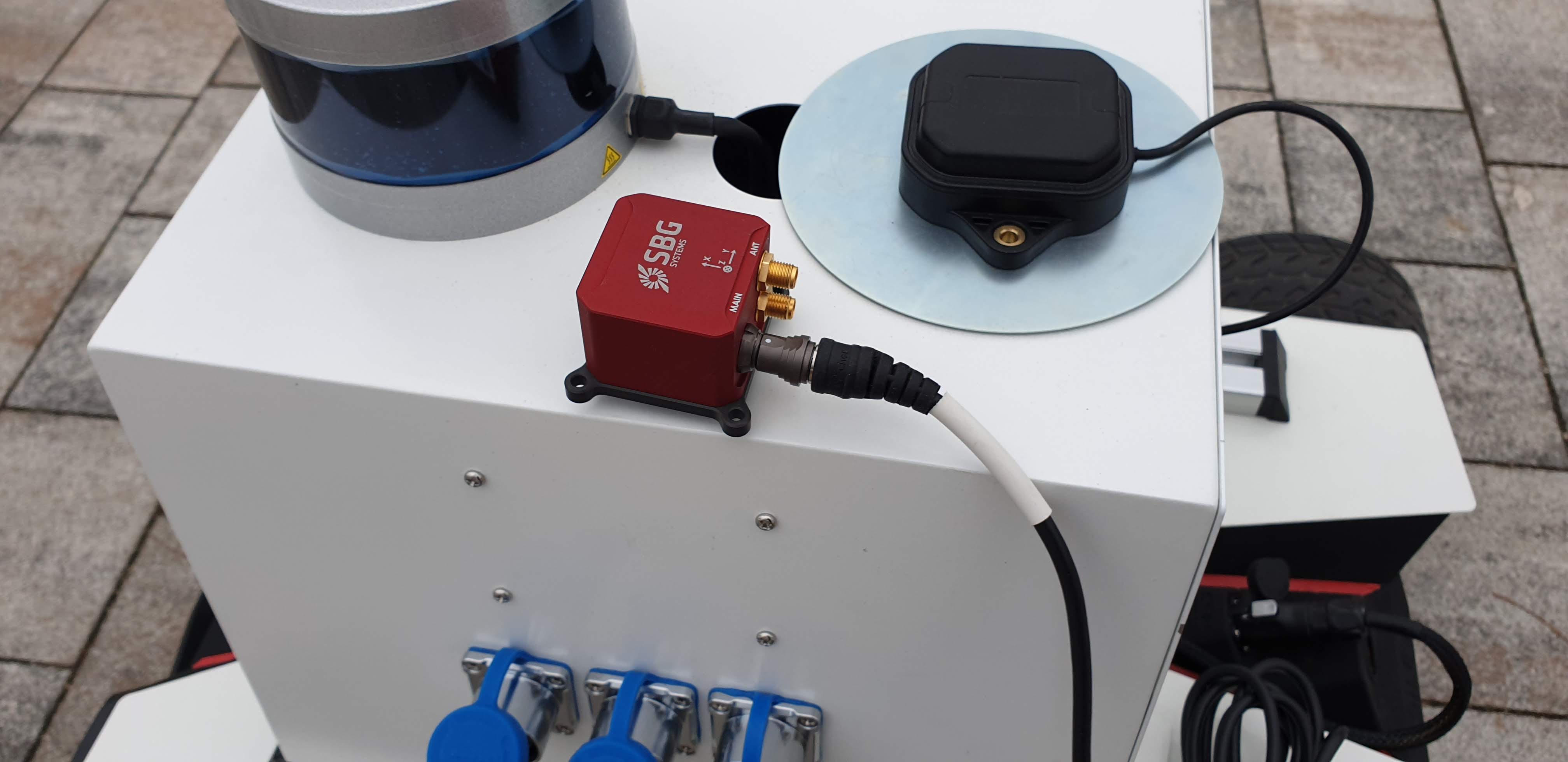
 [SBG Ellipse-D] INS 센서 및 Dual antenna 테스트 화면.
[SBG Ellipse-D] INS 센서 및 Dual antenna 테스트 화면.
 [RLMap-prj] 실제 AGV 로봇에 장착하여 heading 값으로 적용.
[RLMap-prj] 실제 AGV 로봇에 장착하여 heading 값으로 적용.
IMU sensor calibration
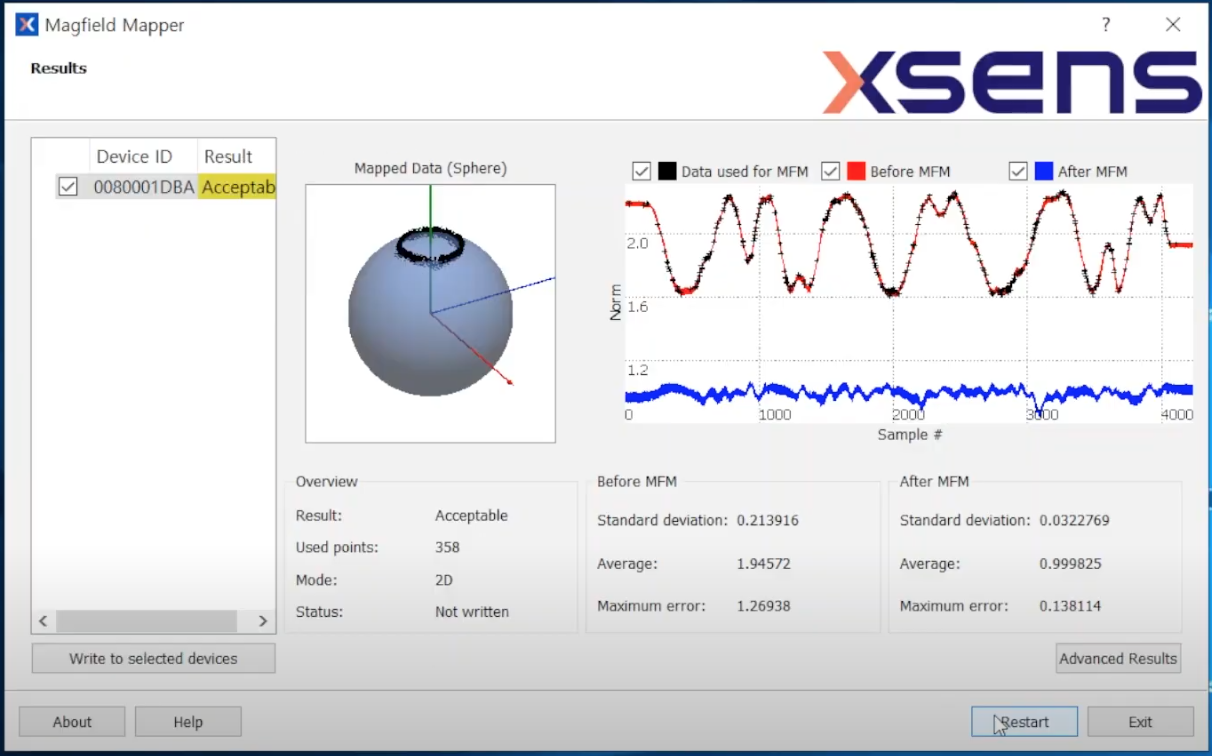 [Magfield Mapper] 사용전 초기 칼리브레이션 실행.
IMU 센서 제조사들 마다 각 센서별 calibration 방법 및 프로그램을 제공하고 있으며, 최적의 동작 및 동작중 drift offset 의 누적오차 등을 최소화 하기 위해서는 calibration 을 진행하는 것이 바람직 하며 실제 마운팅한 AGV (robot) 상태에서 진행하여 노이즈나 환경의 상황에서 진행하는 것이 바람직 합니다.
[Magfield Mapper] 사용전 초기 칼리브레이션 실행.
IMU 센서 제조사들 마다 각 센서별 calibration 방법 및 프로그램을 제공하고 있으며, 최적의 동작 및 동작중 drift offset 의 누적오차 등을 최소화 하기 위해서는 calibration 을 진행하는 것이 바람직 하며 실제 마운팅한 AGV (robot) 상태에서 진행하여 노이즈나 환경의 상황에서 진행하는 것이 바람직 합니다.
heading offset 보정 로직
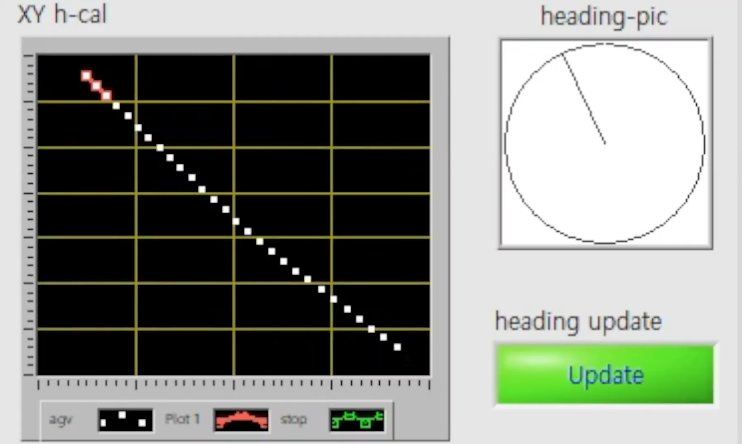 [Map provider] 진북 및 drift offset 보정을 위한 Heading 계산결과 표시 UI.
GPS 의 이동 궤적을 바탕으로 AGV 혹은 robot 의 heading 을 계산하여 imu yaw 값을 보정하여 진북 값을 보정하여 주행로직에 반영. 즉 로봇의 이동이 구간이 직선인 경우 일정 기간을 1차원 interpolation 하여 해당 기울기의 inverse tangent 형태로 degree 을 계산하고 변환하여 drift offset 혹은 진북을 찾고 초기화 하는 로직으로 적용.
특히나 저가형 imu 인 경우 동작 중간 보정 로직의 필요성이 큰 편.
[Map provider] 진북 및 drift offset 보정을 위한 Heading 계산결과 표시 UI.
GPS 의 이동 궤적을 바탕으로 AGV 혹은 robot 의 heading 을 계산하여 imu yaw 값을 보정하여 진북 값을 보정하여 주행로직에 반영. 즉 로봇의 이동이 구간이 직선인 경우 일정 기간을 1차원 interpolation 하여 해당 기울기의 inverse tangent 형태로 degree 을 계산하고 변환하여 drift offset 혹은 진북을 찾고 초기화 하는 로직으로 적용.
특히나 저가형 imu 인 경우 동작 중간 보정 로직의 필요성이 큰 편.
부가기능
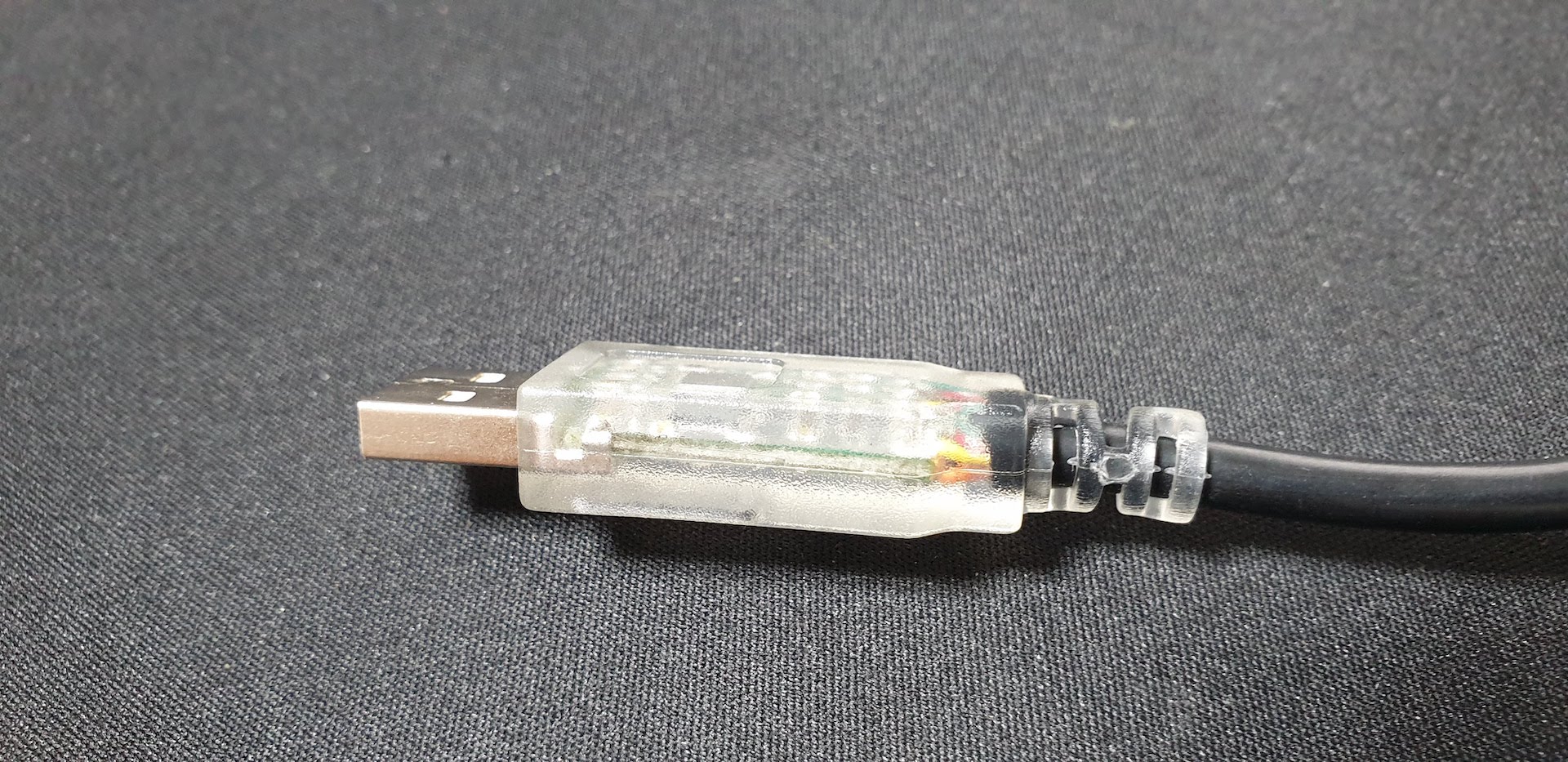 [USB indicator] VN-100 모듈의 기능성 USB 커넥터.
VN-100 모듀의 USB 커넥터는 기능을 추가하여 연결상태, 동작상태 등에 따른 LED 동작의 색/깜박임 등으로 사용자가 편하게 상태를 직접적으로 알 수 있도록 하여 편리함이 있다. 이와 같이 제조사 별로 기능, 지원 툴, 성능, 편의성등 다양한 차이들이 있다.
[USB indicator] VN-100 모듈의 기능성 USB 커넥터.
VN-100 모듀의 USB 커넥터는 기능을 추가하여 연결상태, 동작상태 등에 따른 LED 동작의 색/깜박임 등으로 사용자가 편하게 상태를 직접적으로 알 수 있도록 하여 편리함이 있다. 이와 같이 제조사 별로 기능, 지원 툴, 성능, 편의성등 다양한 차이들이 있다.
마운트 편의성
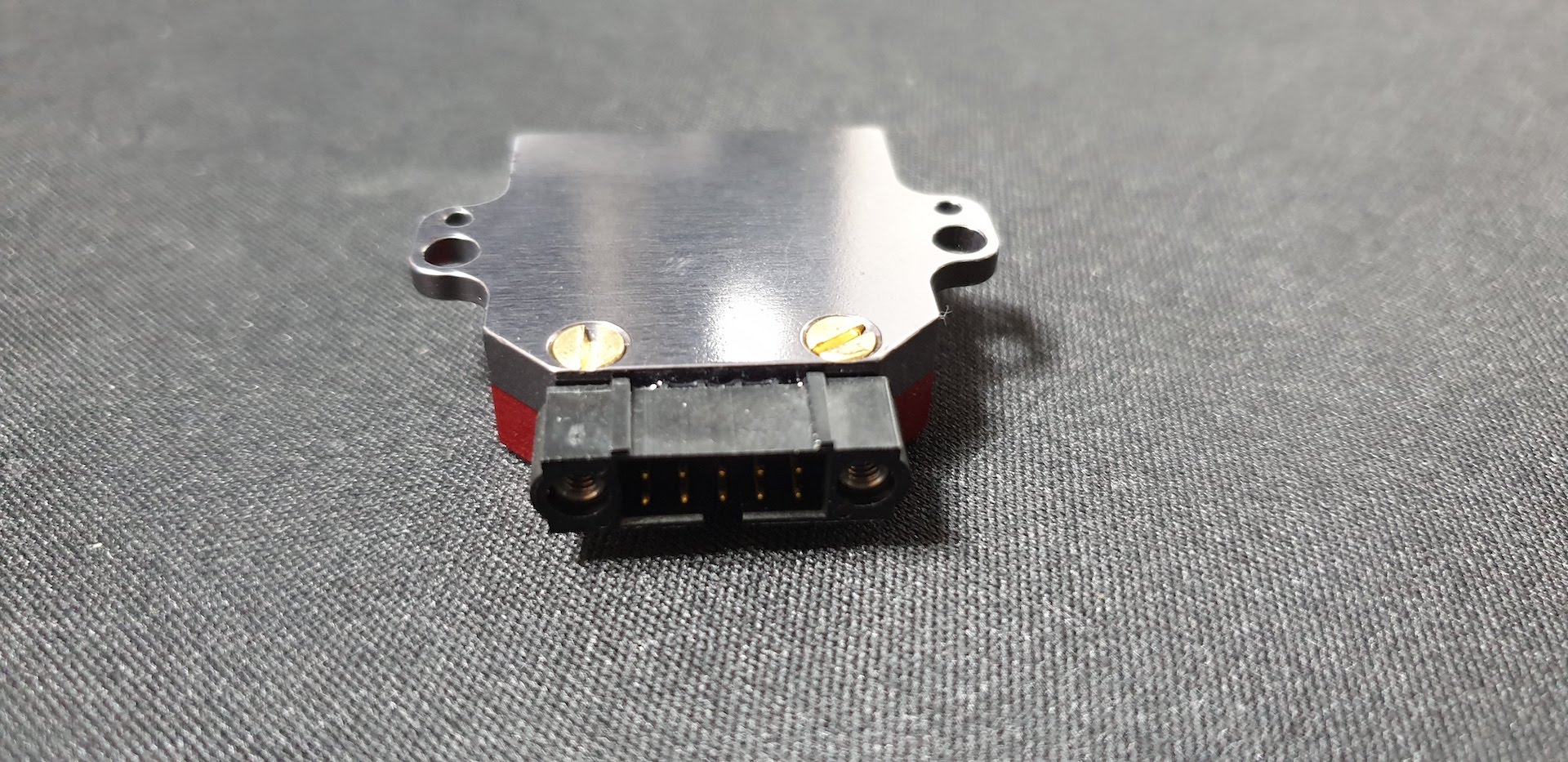 The Next SRC 마운트 홀, 견고성 및 재질 확인.
기본적으로 각 IMU 제조사는 센서를 기기/로봇 등에 마운트를 할 수 있도록 볼트 체결목적 홀 등이 있다.
뿐만 아니라 케이블의 길이, 견고성, 홀 크기, 재질 등 등급이나 모델에 따른 차이도 다양한 편임.
The Next SRC 마운트 홀, 견고성 및 재질 확인.
기본적으로 각 IMU 제조사는 센서를 기기/로봇 등에 마운트를 할 수 있도록 볼트 체결목적 홀 등이 있다.
뿐만 아니라 케이블의 길이, 견고성, 홀 크기, 재질 등 등급이나 모델에 따른 차이도 다양한 편임.
참고
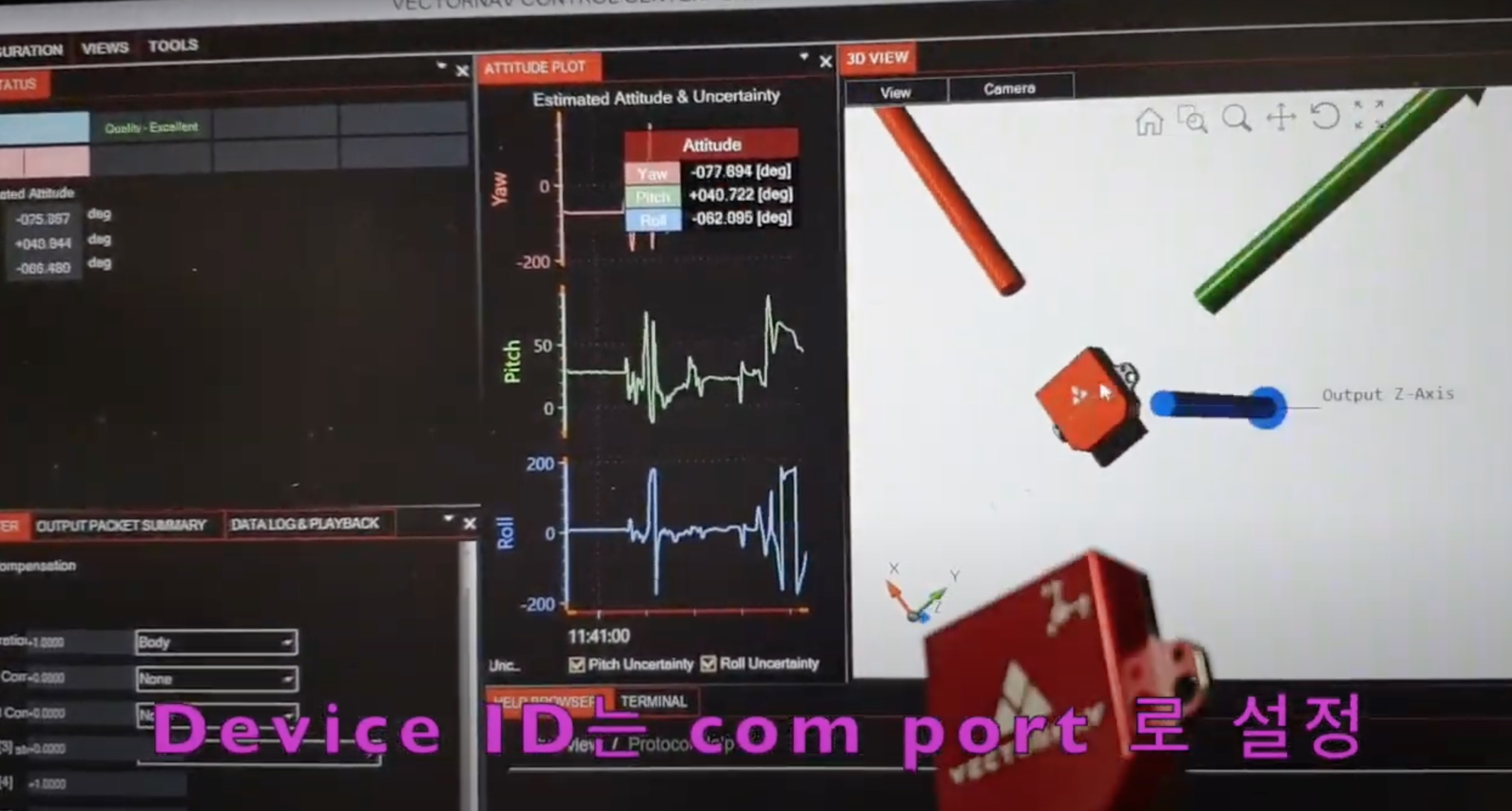 VectorNav 사의 HW 설정 및 Calibration tool
제조사 마다 제공하는 각 회사의 제품에 대한 설정 및 테스트 툴이 있다. Visual 하게는 VectorNav 사의 툴이 시각화가 잘 되어 있는 편이고, 세세한 설정에 대해서 메뉴얼을 참고하는게 필요하며 특히나 사용목적에 따라 다양한 모드나 입력 파라미터들이 나누어져 있으니 최적의 성능을 위해서는 설정도 신경써야 한다.
VectorNav 사의 HW 설정 및 Calibration tool
제조사 마다 제공하는 각 회사의 제품에 대한 설정 및 테스트 툴이 있다. Visual 하게는 VectorNav 사의 툴이 시각화가 잘 되어 있는 편이고, 세세한 설정에 대해서 메뉴얼을 참고하는게 필요하며 특히나 사용목적에 따라 다양한 모드나 입력 파라미터들이 나누어져 있으니 최적의 성능을 위해서는 설정도 신경써야 한다.
Ybbaek
테스트자동화 엔지니어를 시작으로 반도체,자동차,국방,가전 등의 분야에 성능평가와 검사자동화 시스템등을 구축한 경험을 바탕으로 현재는 모바일 자율주행 로봇을 개발하고 있습니다.

Comments