무인 자율운항 선박
지상이나 뿐만 아니라 물 위에서 무인보트 개발을 위한 ASV, 자율운항 선박(보트) 등의 주행알고리즘 개발이나 선박주행의 센서퓨전, 기타 제어로직 연구에 적합하도록 개발되었습니다.
사양:
- 수중모터(Thruster) 2개의 속도제어를 이용하여 방향제어
- GPS, Lidar 를 활용하여 주행경로, 충돌회피 등에 적용
추가옵션:
- 방향제어를 위한 키 추가 장착가능
- 사양에 맞게 배터리 옵션, 제어기 설정등 맞춤형 제작 가능
SRC 와 같은 자율주행 차량보다 좀더 자유로운 제어나 운항을 테스트 해 볼 수 있으나 물 위에서 움직이는 만큼 이동궤적에 차이가 있습니다.
수중모터, 방향키 등을 쉽게 추가/ 변경이 가능
기본 2개의 수중모터를 사용하고 있으나 추가나 좀더 높은 사양으로 쉽게 업그레이드가 가능함
ESC Calibration instruction
초기에 제공되는 ESC 는 기본적으로 초기 Calibration 이 필요하며 Arduino 를 활용하여 모터의 Min/Max speed 설정을 하여 사용을 해야 합니다..
인터넷상에 많은 Aruduino 기반의 ESC Calibration 소스코드를 활용 할 수 있습니다.:
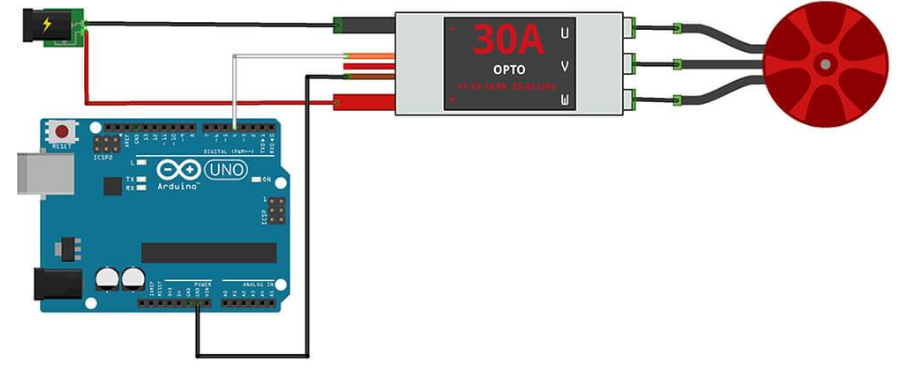 Arduino를 활용한 ESC Calibation 연결 결선도
Arduino를 활용한 ESC Calibation 연결 결선도
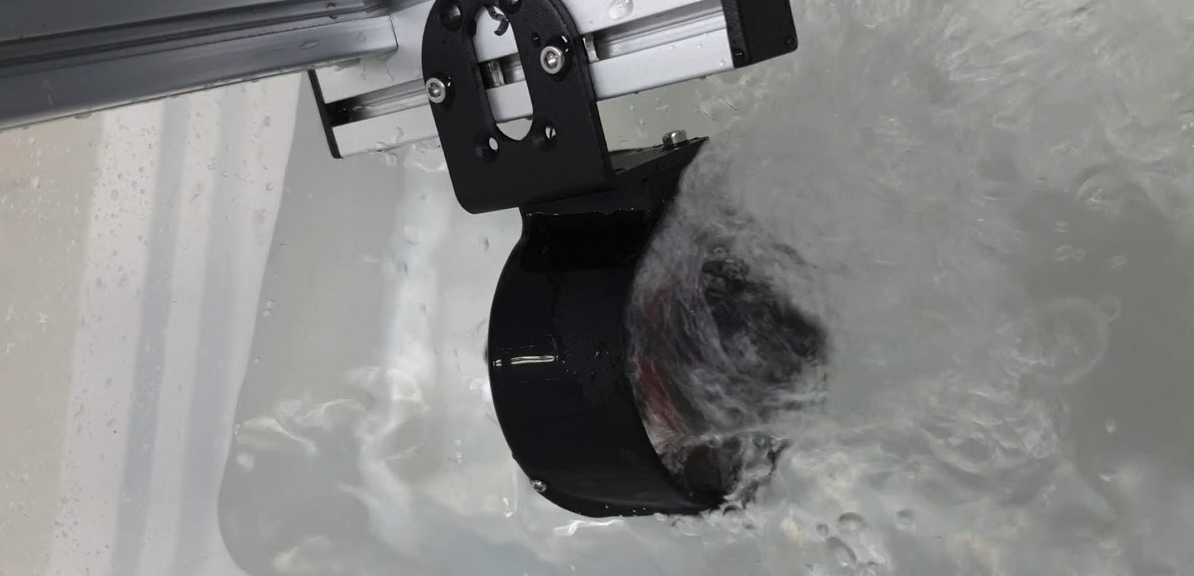
Finally it came self sailing boat
- 수중모터 테스트와 칼리브레이션은 무부하 상태보다 수중에서 진행하는게 바람직 합니다.
- 칼리브레이션 진행시 ‘삐’하는 동작음이 들리고 스케일에 따라 몇 번의 조정이 필요할 수 있습니다.
주의사항(경험):
- 배터리 파워가 부족하면 ESC가 자동으로 동작을 중지하게 하는 경우가 있습니다.
- Calibration은 매번 할 필요없이 처음 1회만 하면 됩니다.
- Calibration 완료후 관련 Arduino 코드에는 테스트 코드도 같이 제공되니 바로 확인 가능합니다.
 다양한 종류의 수중모터(Thruster) 테스트
다양한 종류의 수중모터(Thruster) 테스트
그리고 ASV는 다양한 보트, 요트, 선박등의 디자일들을 고려하여 개량하고 모델을 추가할 예정입니다.
자율운항 보드 대회
테스트 진행이 어느 정도 되고 개발이 마무리 되면 대한조선학회에서 주최하는 ‘자율운항보드 경진대회’ 참석하는 것도 추천 드립니다.
Ybbaek
테스트자동화 엔지니어를 시작으로 반도체,자동차,국방,가전 등의 분야에 성능평가와 검사자동화 시스템등을 구축한 경험을 바탕으로 현재는 모바일 자율주행 로봇을 개발하고 있습니다.

Comments