기본기능
알엘모델 SRC-D Smart farm 버전의 목적은 실내외 특히 야외에 있는 농작물의 다양한 발육상태, 이상유무 등을 원격에서도 최대 4대의 카메라를 통해 확인/분석/전송을 편리하게 할 수 있게하여 더운 여름이나 오지에 가야하는 불편함을 줄여줄 수 있습니다.
상세설명
기본적으로 로봇이 이동하는 경로를 위성지도를 활용하여 설정하고 작성된 경로파일(waypoint) 을 전송하여 로봇이 기본적으로 경로를 바탕으로 GPS 기반으로 이동하여 동작하게 됩니다.  [RLMap-UI] 야외 경작지 이동화면.
[RLMap-UI] 야외 경작지 이동화면. 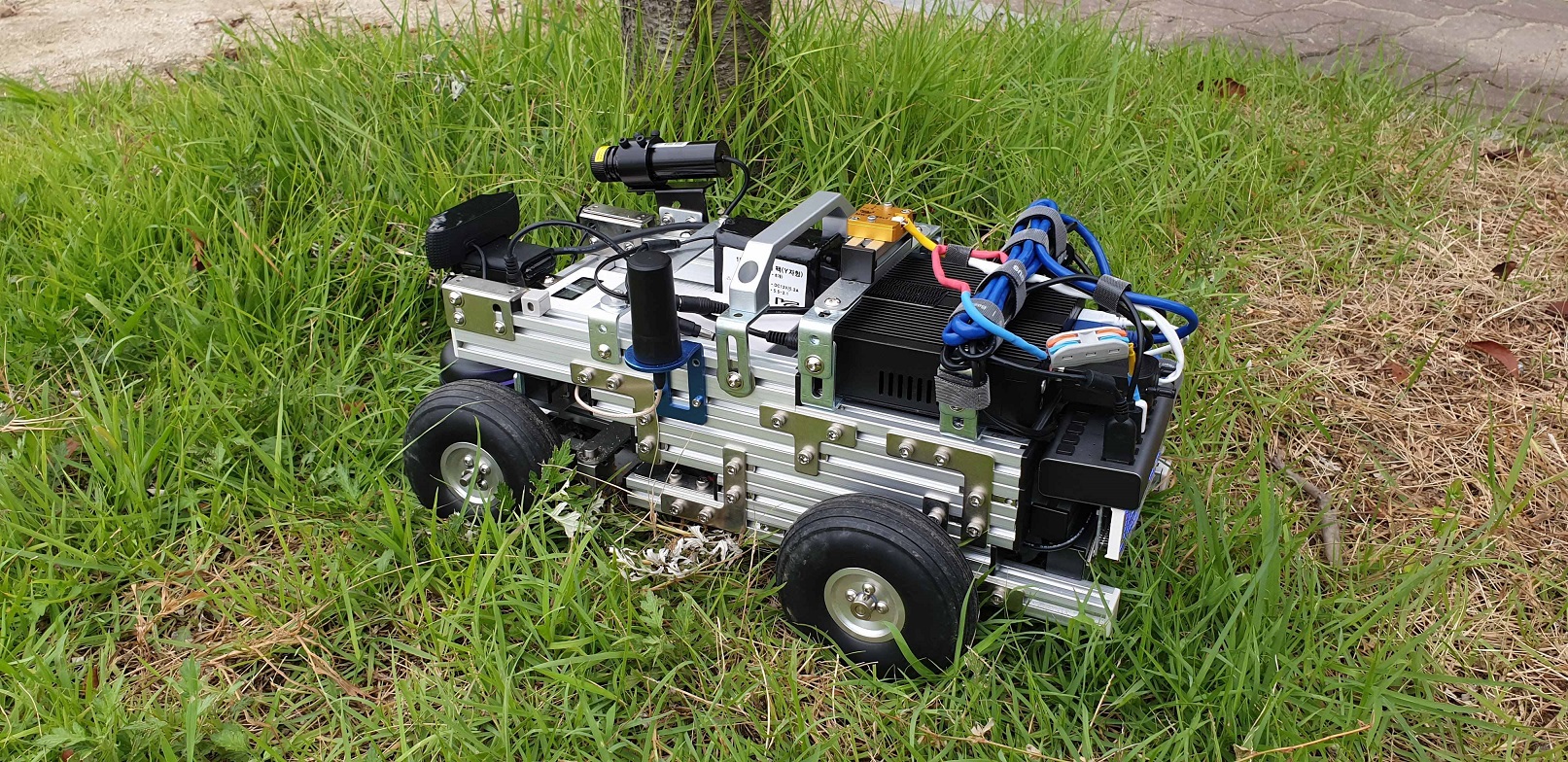 [RLMap-prj] 다양한 환경의 오프로드 테스트 진행.
[RLMap-prj] 다양한 환경의 오프로드 테스트 진행.
주행설정/분석
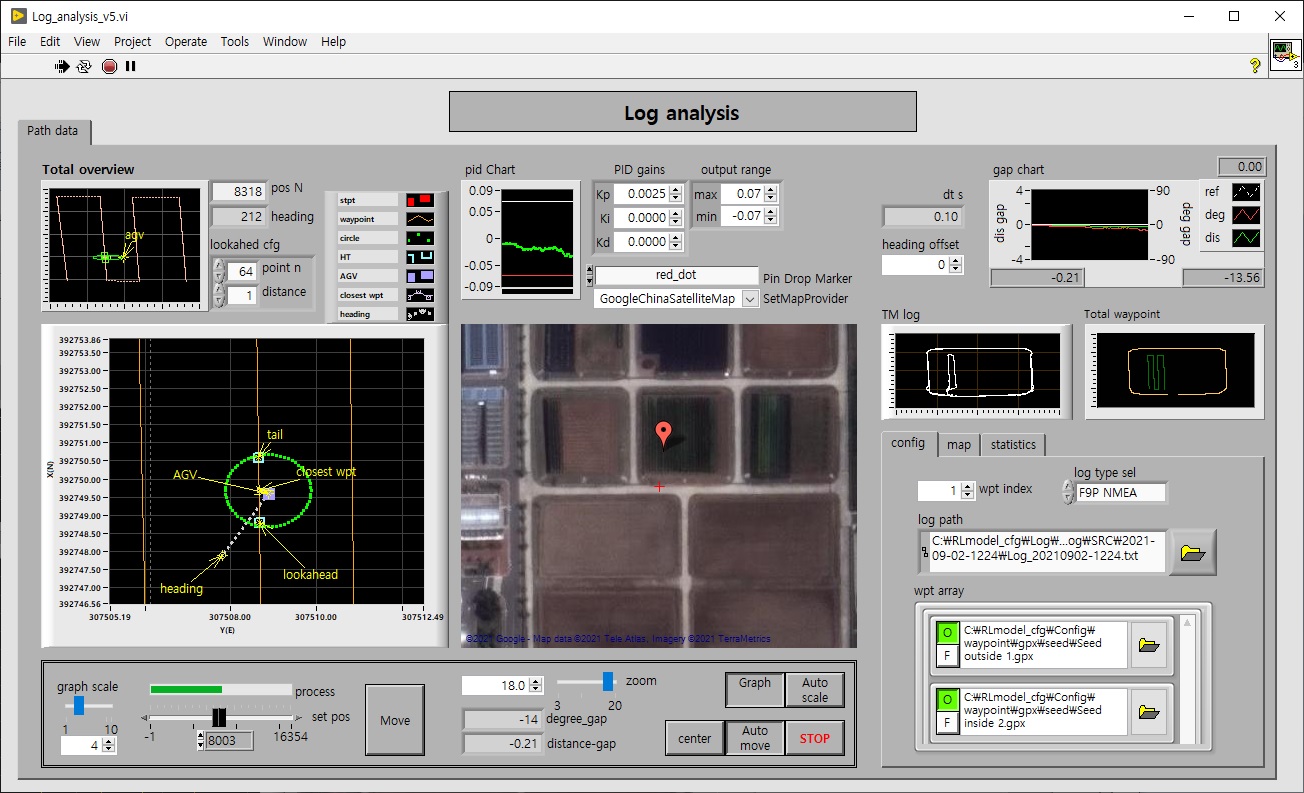 [log file] 주행후 로그파일을 분석하여 경로확인 및 평가. 설정된 경로확인 및 실제주행 경로와의 비교. 그리고 전체 경로의... read more
[log file] 주행후 로그파일을 분석하여 경로확인 및 평가. 설정된 경로확인 및 실제주행 경로와의 비교. 그리고 전체 경로의... read more
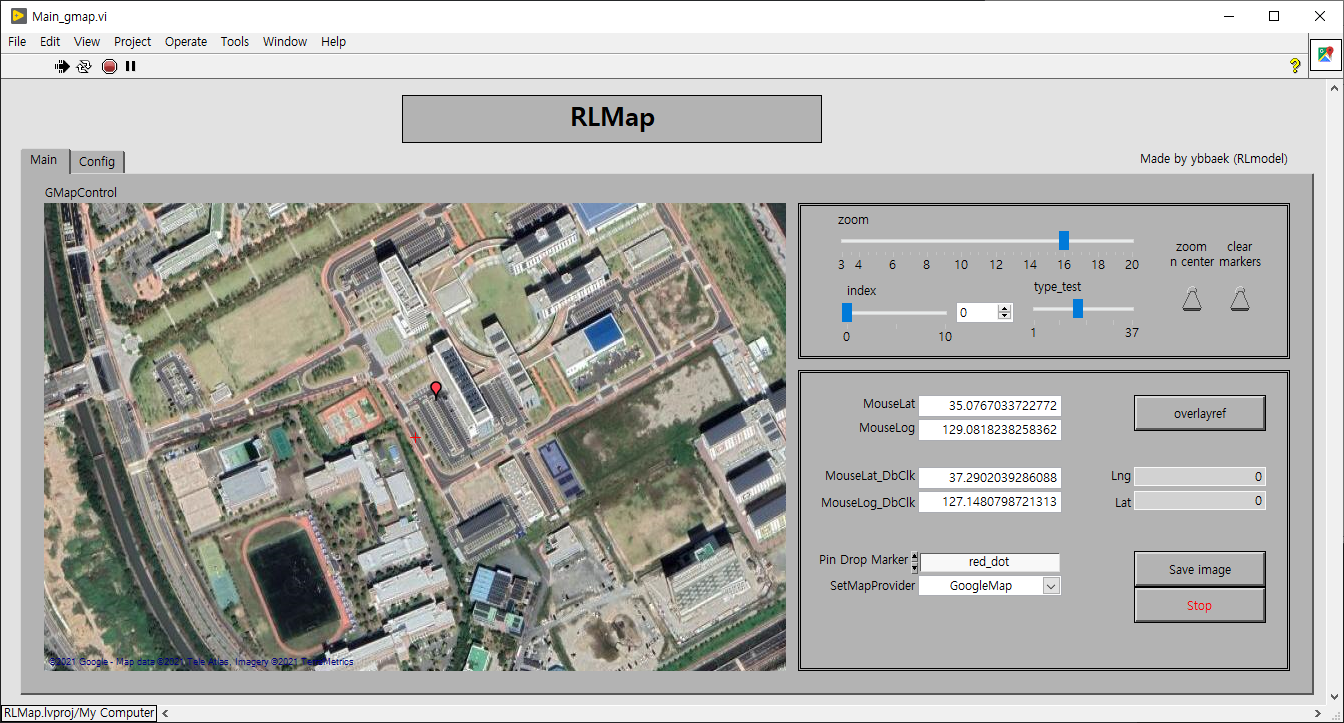 [RLMap-UI] 지도표시 LabVIEW 소스코드 와 같이 제공되는 예제.
[RLMap-UI] 지도표시 LabVIEW 소스코드 와 같이 제공되는 예제.  [RLMap-prj] LabVIEW Project 윈도우 화면.
[RLMap-prj] LabVIEW Project 윈도우 화면.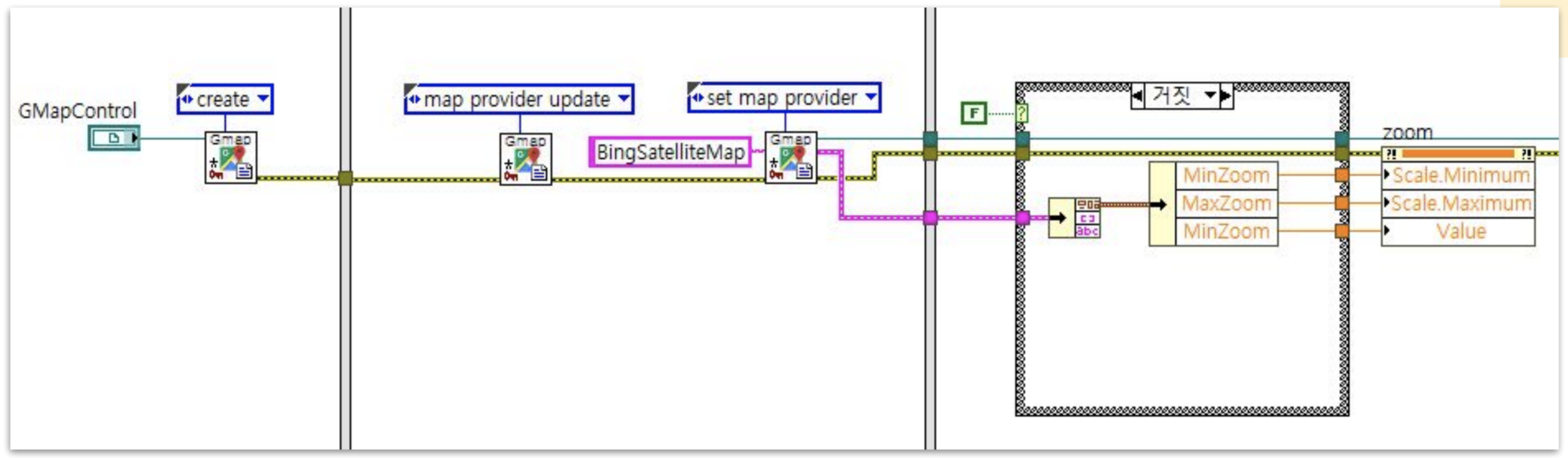 [Metal frame] Gmap Dot net 을 사용하여 쉽게 사용할...
[Metal frame] Gmap Dot net 을 사용하여 쉽게 사용할... [실내 트랙] 교차로가 있는 기본 원형트랙.
[실내 트랙] 교차로가 있는 기본 원형트랙.  [추가 미션] 긴급정지/ 이미지처리 등의 미션을 하기위한 동적장애물과 신호등 .
[추가 미션] 긴급정지/ 이미지처리 등의 미션을 하기위한 동적장애물과 신호등 .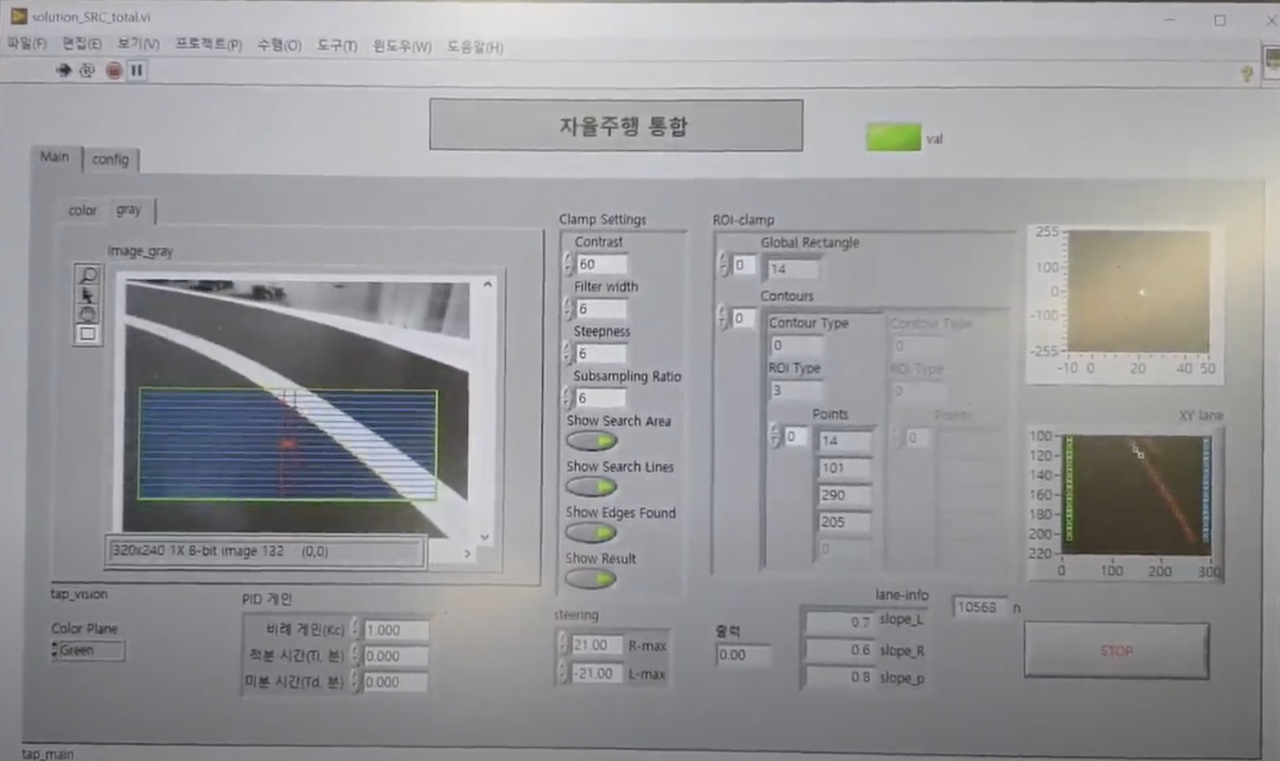 [image processing] Vision toolkit 을 사용하여 image processing 적용. 다양한 비젼 image processing 중 간단한 grayscale 추출 후 흑/백 이미지의 threshold 를 설정하여 2개의 차선의 폭을 계산하고 추가로 2개 혹은 1개의 차선의 기울기를 계산하여 값을 조향제어에 반영
[image processing] Vision toolkit 을 사용하여 image processing 적용. 다양한 비젼 image processing 중 간단한 grayscale 추출 후 흑/백 이미지의 threshold 를 설정하여 2개의 차선의 폭을 계산하고 추가로 2개 혹은 1개의 차선의 기울기를 계산하여 값을 조향제어에 반영 ...
... [SBG Ellipse-D] INS 센서 및 Dual antenna 테스트 화면.
[SBG Ellipse-D] INS 센서 및 Dual antenna 테스트 화면. 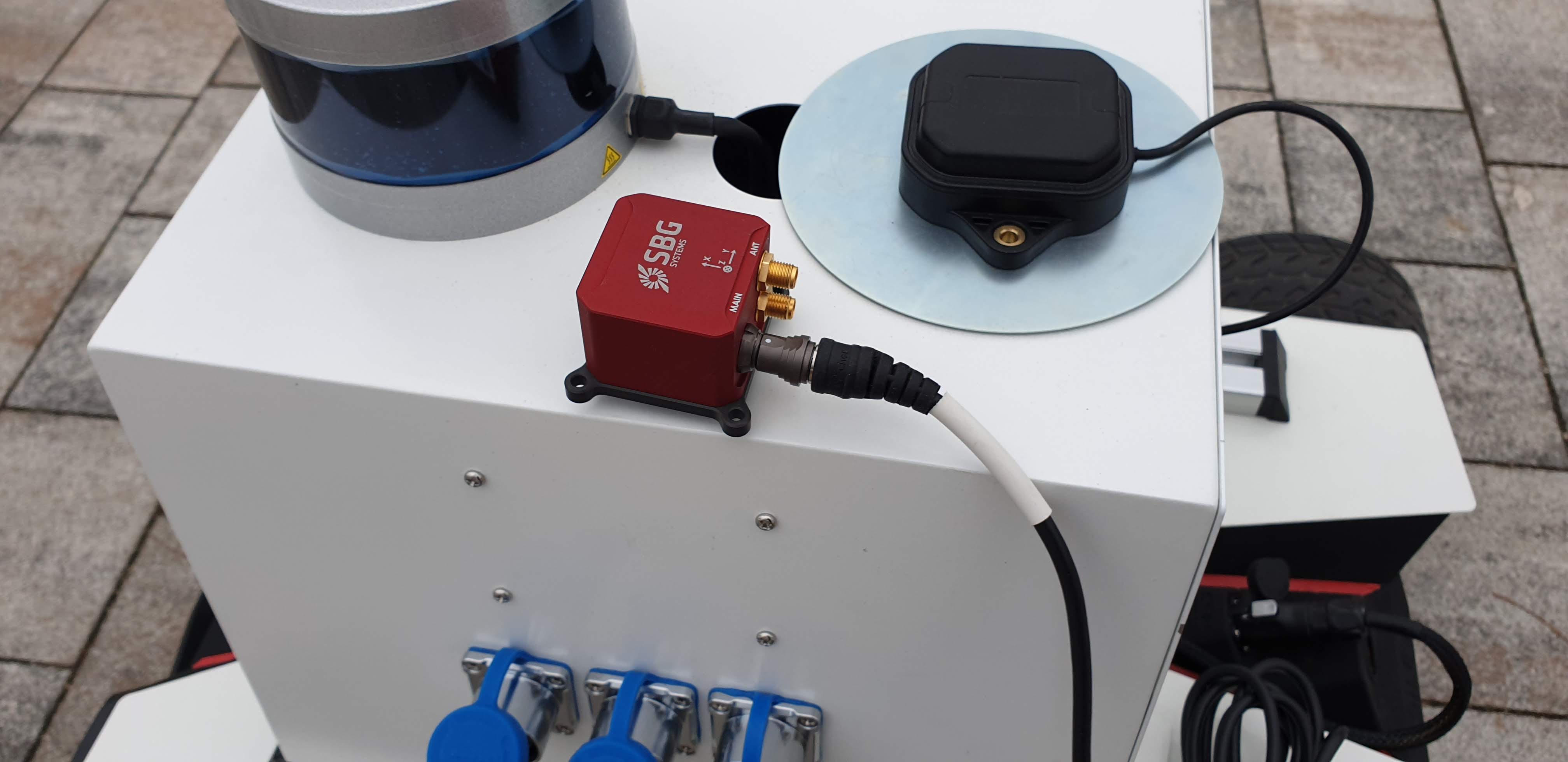 [RLMap-prj] 실제 AGV 로봇에 장착하여 heading 값으로 적용.
[RLMap-prj] 실제 AGV 로봇에 장착하여 heading 값으로 적용.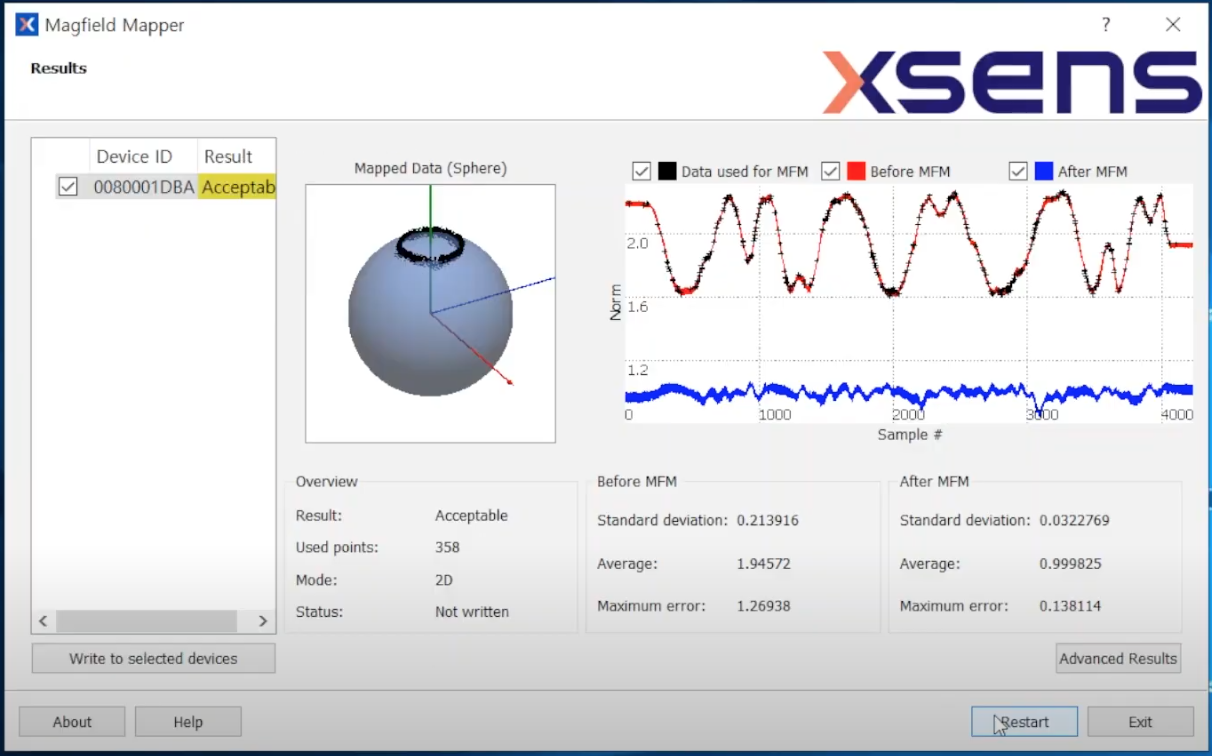 [Magfield Mapper] 사용전 초기 칼리브레이션 실행. IMU 센서 제조사들 마다 각 센서별 calibration 방법 및...
[Magfield Mapper] 사용전 초기 칼리브레이션 실행. IMU 센서 제조사들 마다 각 센서별 calibration 방법 및... 다양한 HW 및 SW 모듈로 주행알고리즘 검증 및 센서퓨전 테스트에 적용완료
다양한 HW 및 SW 모듈로 주행알고리즘 검증 및 센서퓨전 테스트에 적용완료 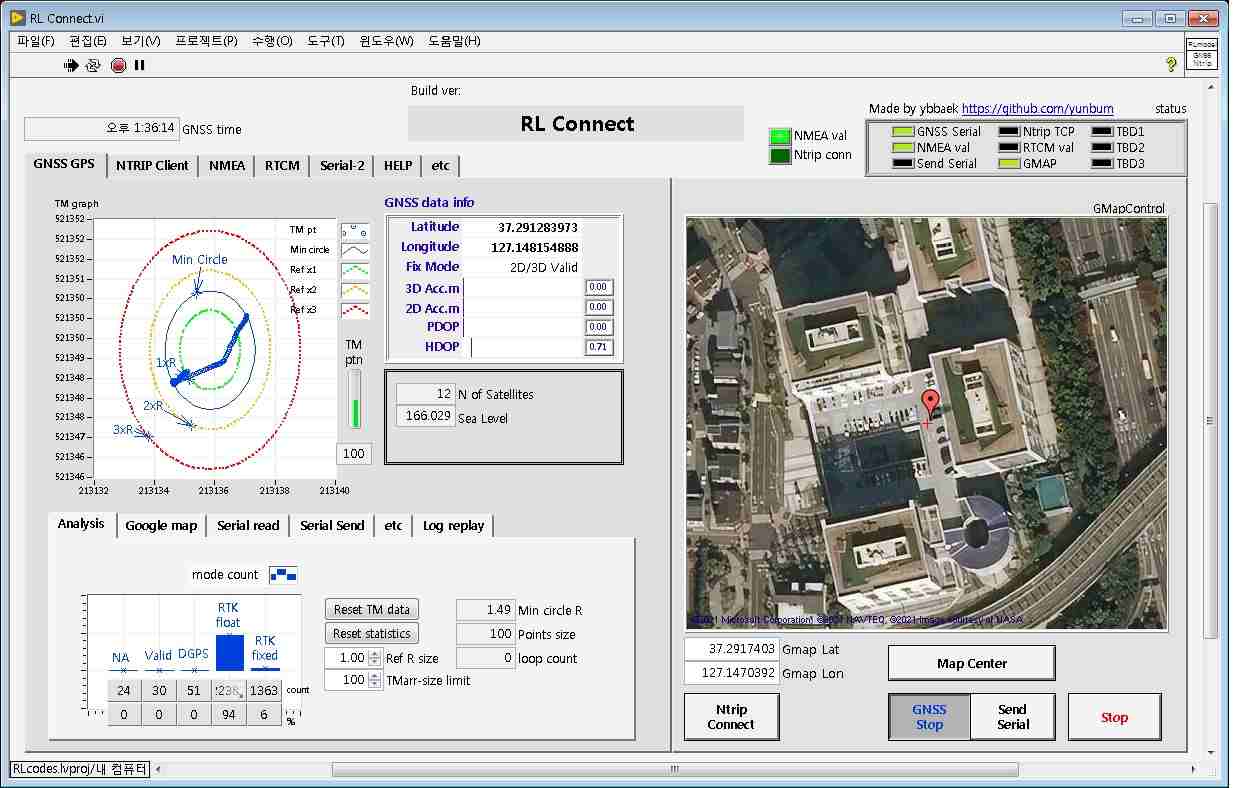 [RL_Connect] Netwrok RTK 모드 설정을 위한 Ntrip client..
[RL_Connect] Netwrok RTK 모드 설정을 위한 Ntrip client..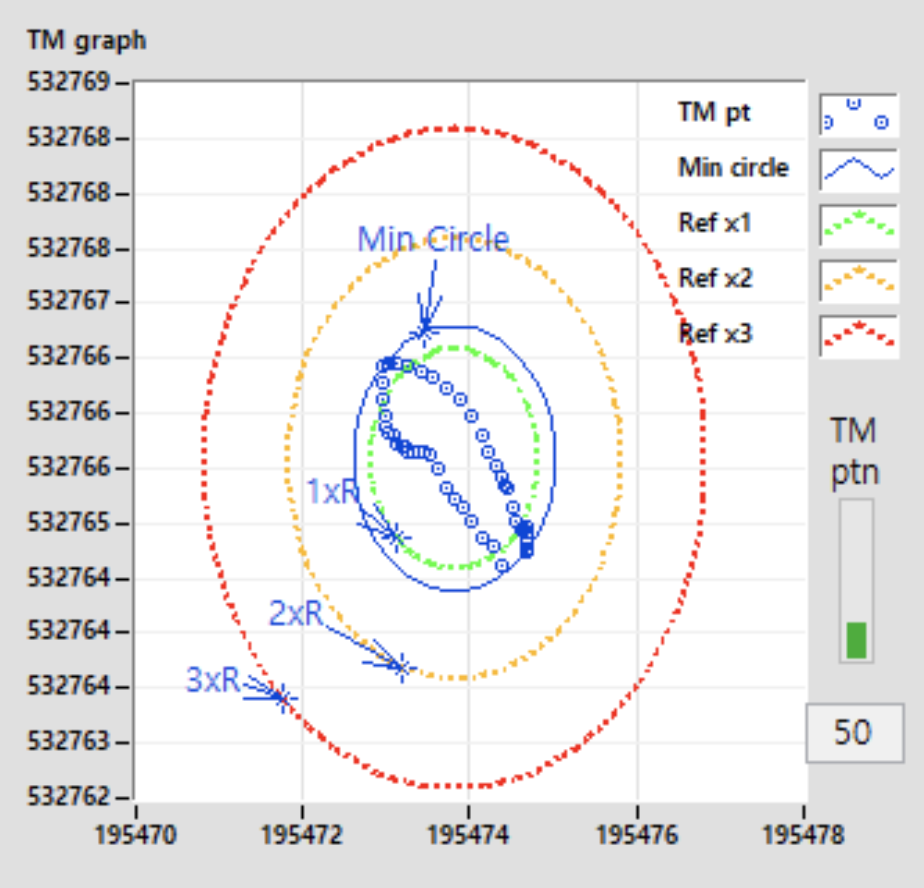
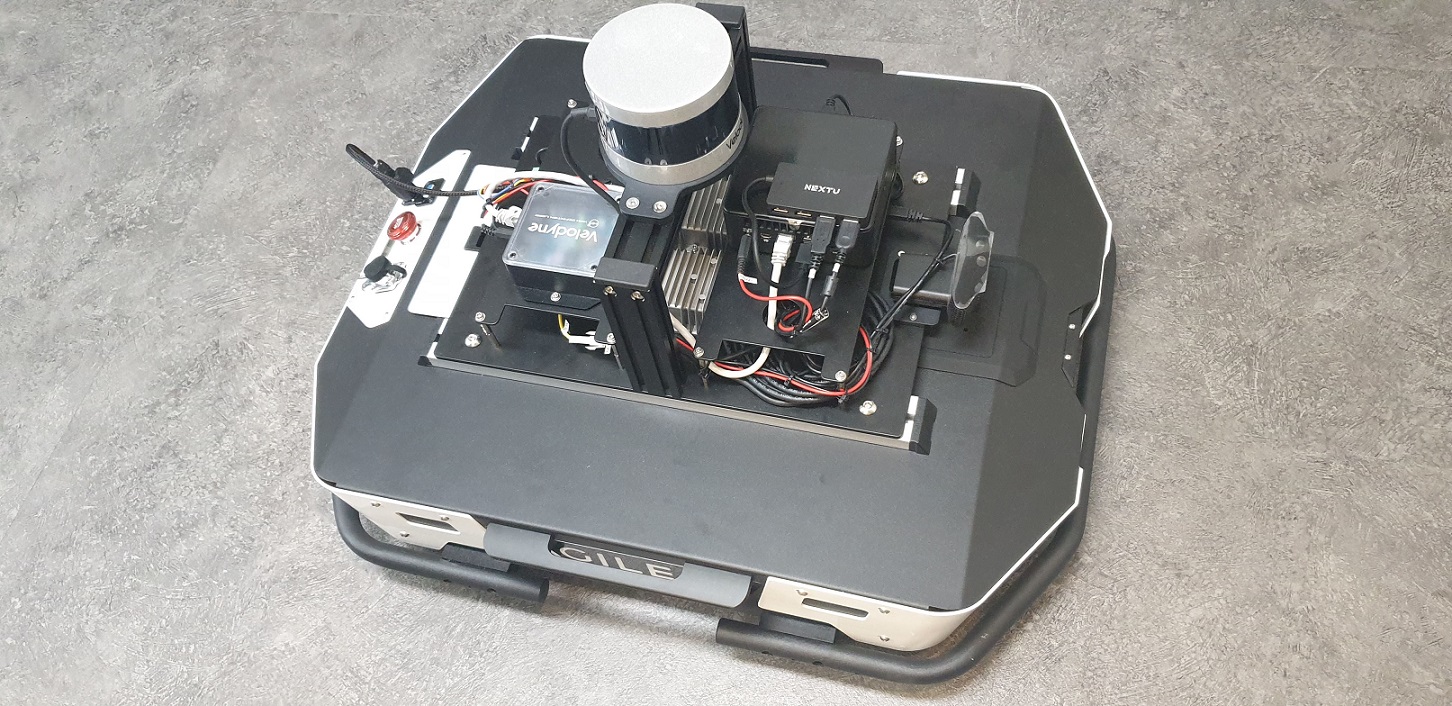 [Tracer] 공장 물류 로봇.
[Tracer] 공장 물류 로봇. [Tracer] PC, Lidar, IMU, Camera 부착 .
[Tracer] PC, Lidar, IMU, Camera 부착 .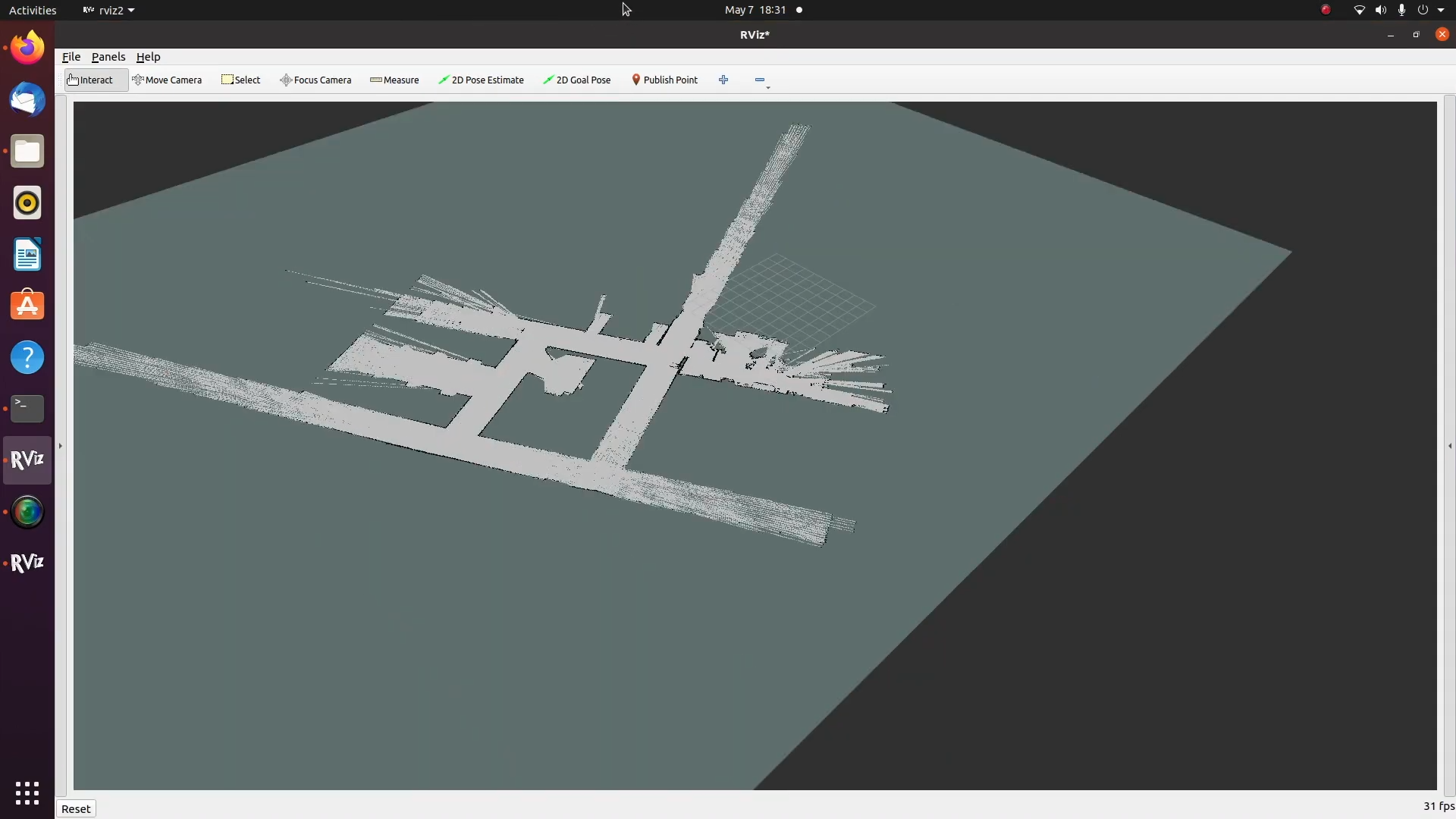 [mapping] gmapping 패키지를 사용하여 지도생성. ROS2 환경에서 Slam 패키지로 많이 사용되는 slam toolbox 를 사용하여 지도생성
[mapping] gmapping 패키지를 사용하여 지도생성. ROS2 환경에서 Slam 패키지로 많이 사용되는 slam toolbox 를 사용하여 지도생성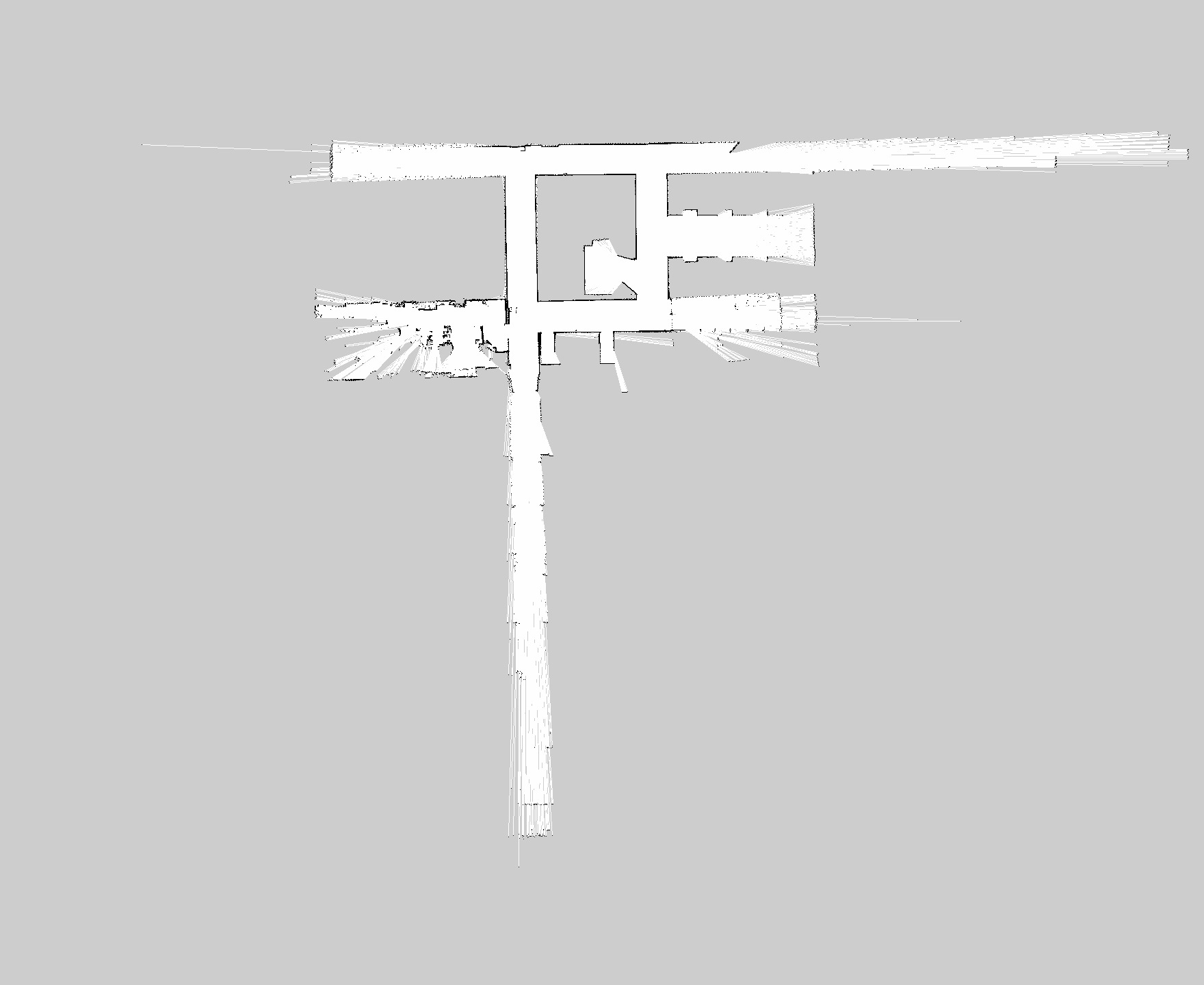 [pgm 파일] 최종 지도 파일...
[pgm 파일] 최종 지도 파일...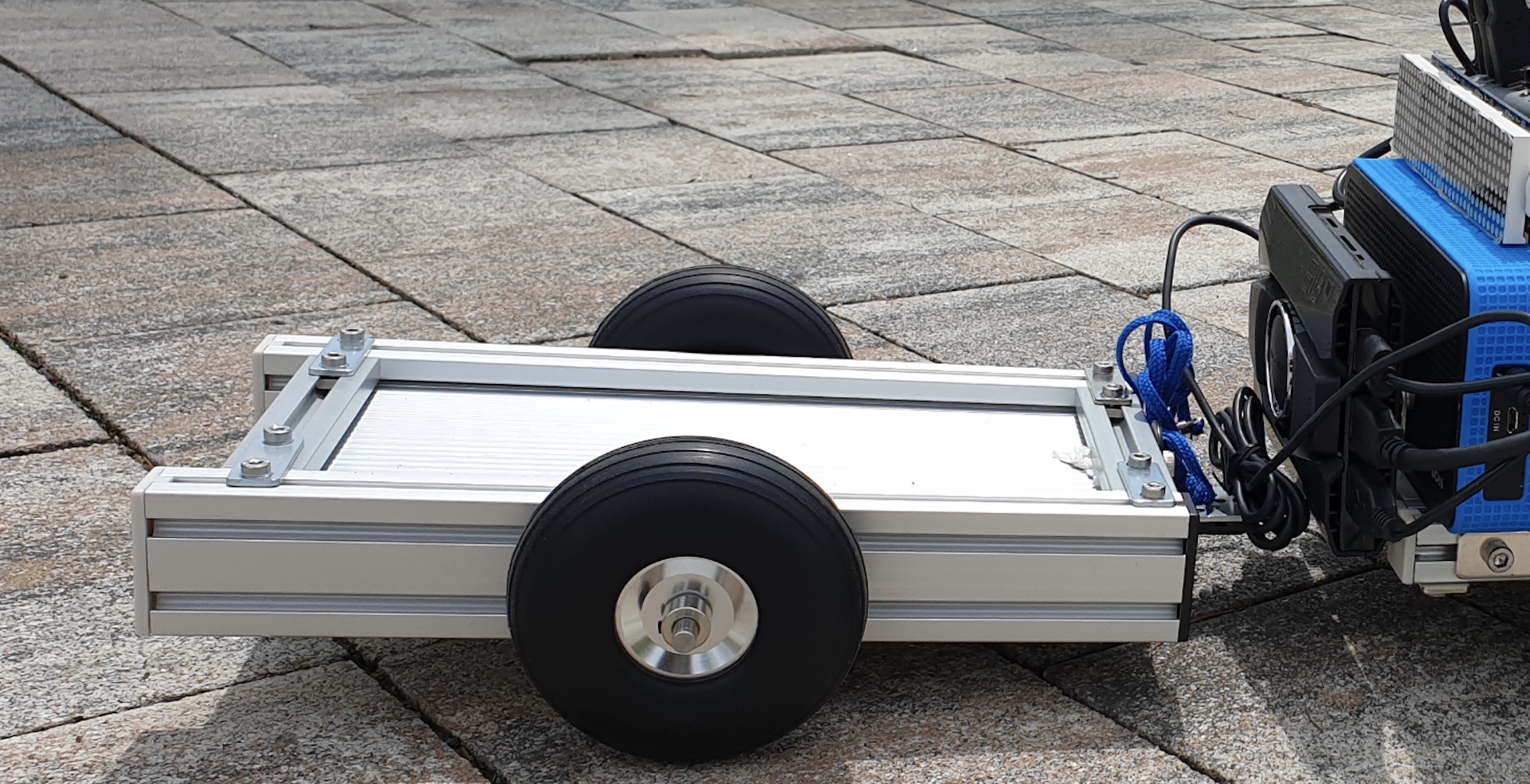 SRC 관련 트레일러 (Trailer)
SRC 관련 트레일러 (Trailer) 8x32 led dot matrix 원하는 메세지 출력가능
8x32 led dot matrix 원하는 메세지 출력가능 3색 R, G, B 칼라
3색 R, G, B 칼라 [Novatel] Novatel PIM222A Dual antenna 사용중.
[Novatel] Novatel PIM222A Dual antenna 사용중.  [MBC] MRP-2000v2 Broadcast rtk 제품 .
[MBC] MRP-2000v2 Broadcast rtk 제품 . [INS heading] . High end GPS(INS) 제품 군의 Novatel INS 의 보급형 PIM222A 기반의 제품으로 Dual antenna 를 사용하여 NMEA PASHR 값을 사용 진북 Heading 값 및 20hz 업데이트 속도 테스트
[INS heading] . High end GPS(INS) 제품 군의 Novatel INS 의 보급형 PIM222A 기반의 제품으로 Dual antenna 를 사용하여 NMEA PASHR 값을 사용 진북 Heading 값 및 20hz 업데이트 속도 테스트 [SRC history] 여러 제조사들의 모바일 로봇들을 적용/개발하면서 주행알고리즘 및 서비스 기능들을 개발..
[SRC history] 여러 제조사들의 모바일 로봇들을 적용/개발하면서 주행알고리즘 및 서비스 기능들을 개발..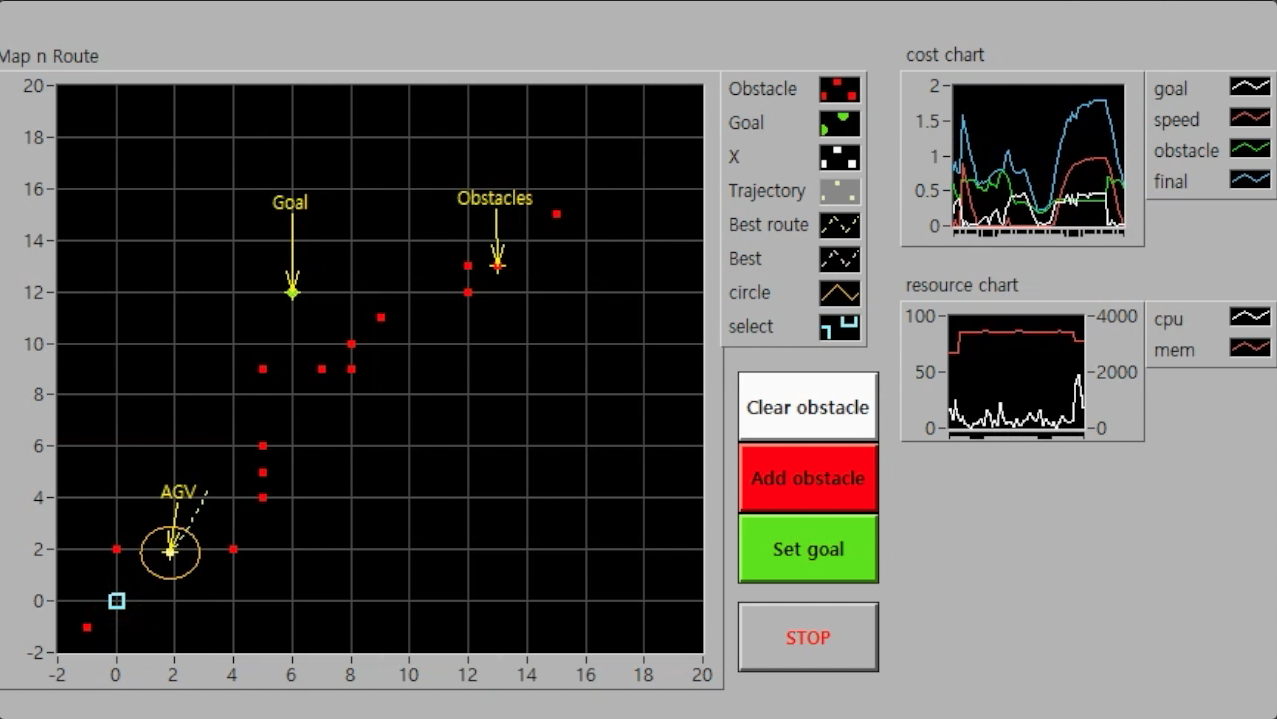
 다양한 GPS 모듈 테스트 진행.
다양한 GPS 모듈 테스트 진행.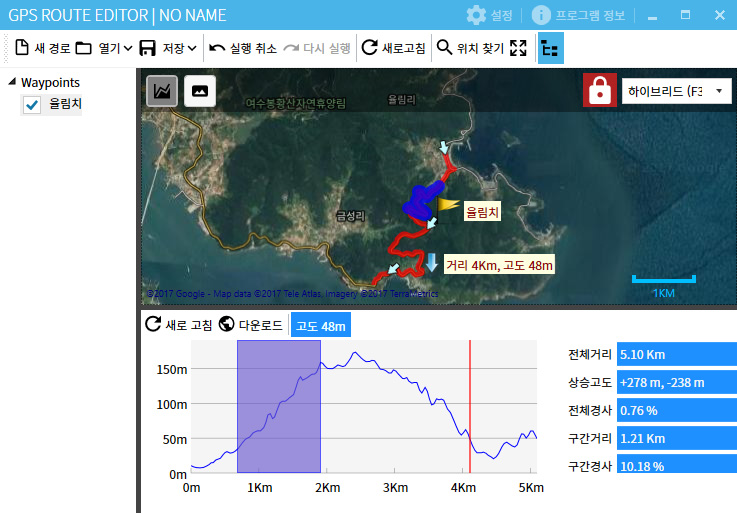 GPX route editor 실행화면
GPX route editor 실행화면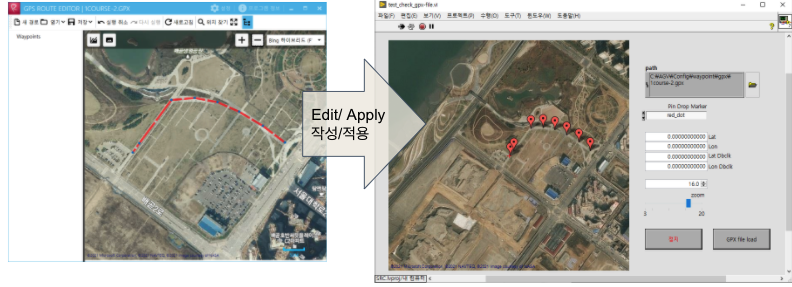 GPX 파일의 위도/경도 값 읽어 TM 좌표로 표시
GPX 파일의 위도/경도 값 읽어 TM 좌표로 표시