기본기능
유저 Interface 상에 지도표시 기능을 구현할 수 있도록 유로모 판매하는 LabVIEW Toolkit 이며 하나의 core vi로 쉽게 구현되도록 Functional Global Variable 형태의 vi로 예제와 같이 제공합니다. 물론 기본 공개 예제는 repo 에 공개하였습니다. 기본 기능의 차이는 없습니다.
상세설명
다양한 목적으로 LabVIEW Front panel UI 상에 편리한 Gmap .net 기반의(Web 기반 아님) 지도표시 및 관련기능을 구현 할 수 있도록 툴킷을 판매하고 있습니다.
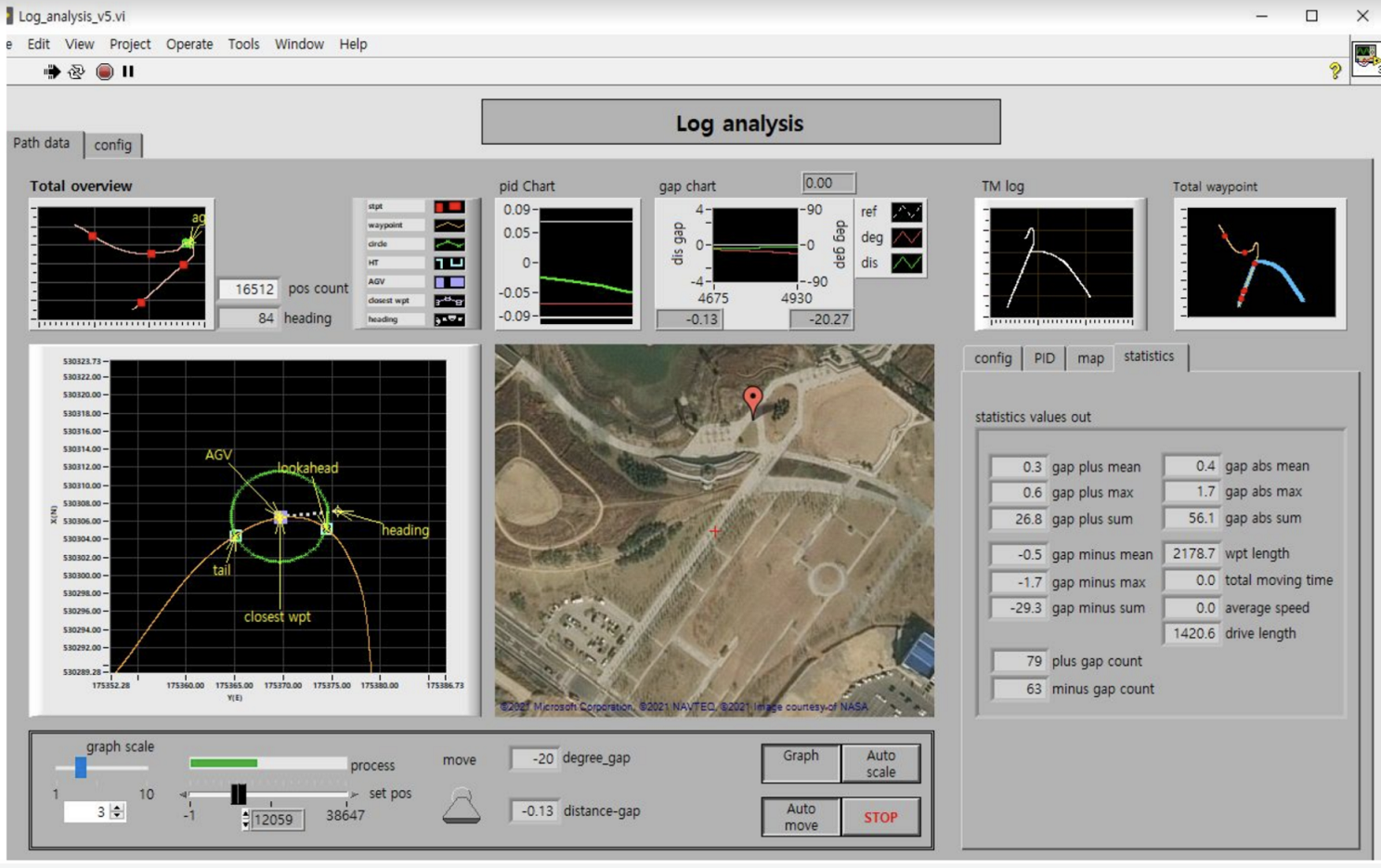
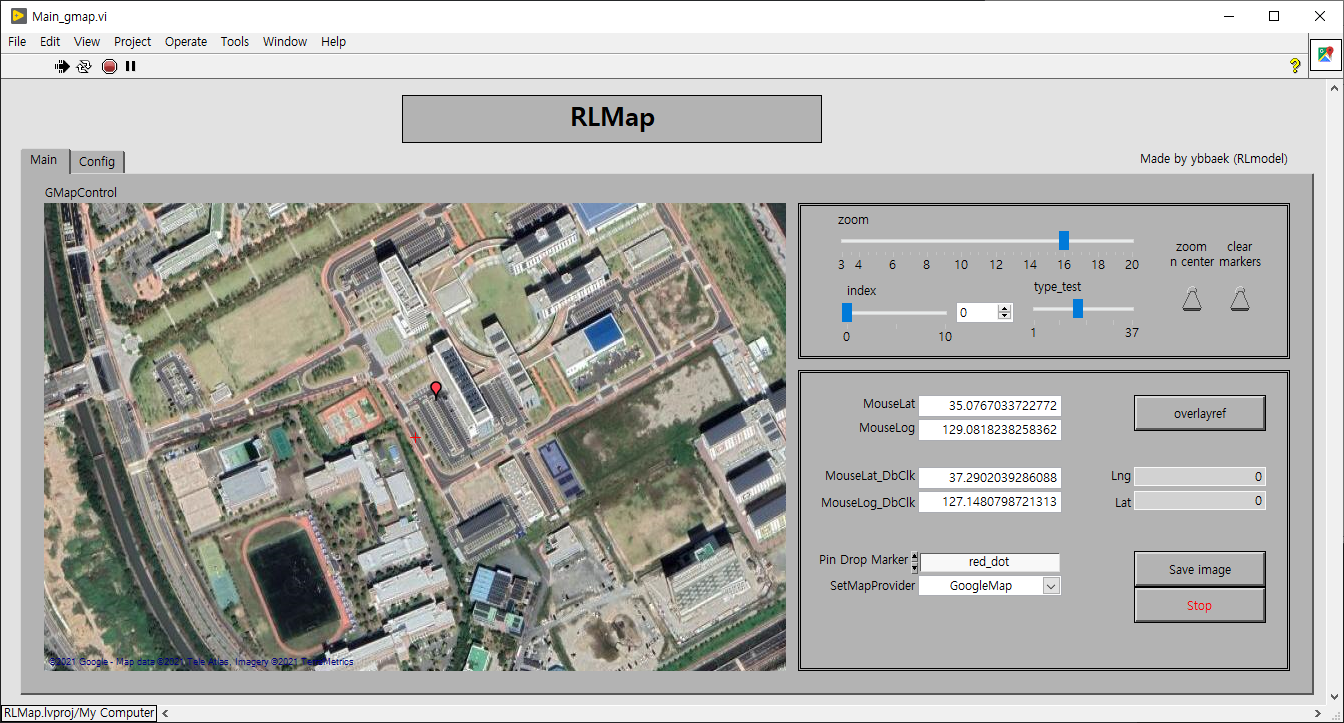 [RLMap-UI] 지도표시 LabVIEW 소스코드 와 같이 제공되는 예제.
[RLMap-UI] 지도표시 LabVIEW 소스코드 와 같이 제공되는 예제.
 [RLMap-prj] LabVIEW Project 윈도우 화면.
[RLMap-prj] LabVIEW Project 윈도우 화면.
예제코드
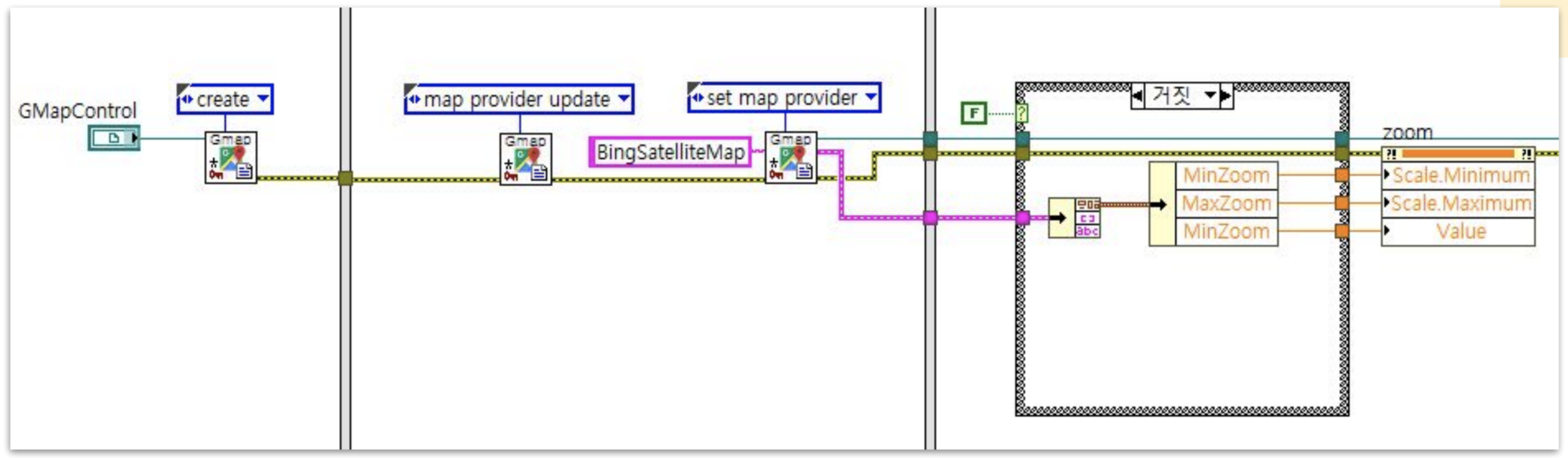 [Metal frame] Gmap Dot net 을 사용하여 쉽게 사용할 수 있도록 하나의 fgv vi 로 통합 하였고 관련 예제코드도 같이 제공합니다..
[Metal frame] Gmap Dot net 을 사용하여 쉽게 사용할 수 있도록 하나의 fgv vi 로 통합 하였고 관련 예제코드도 같이 제공합니다..
다양한 기본적인 지도 선택/확인 및 Marker 추가, 확대, 축소, 현재이미지 저장 등의 기능을 확인 할 수 있도록 함.
지도 공급사 선택
 [Map provider] ex) Street4U 화면.
[Map provider] ex) Street4U 화면.
다양한 지도제공 업체를 선택하여 원하는 타입, 정밀도, 등에 따라 선택하여 적용 및 사용가능.
부가기능
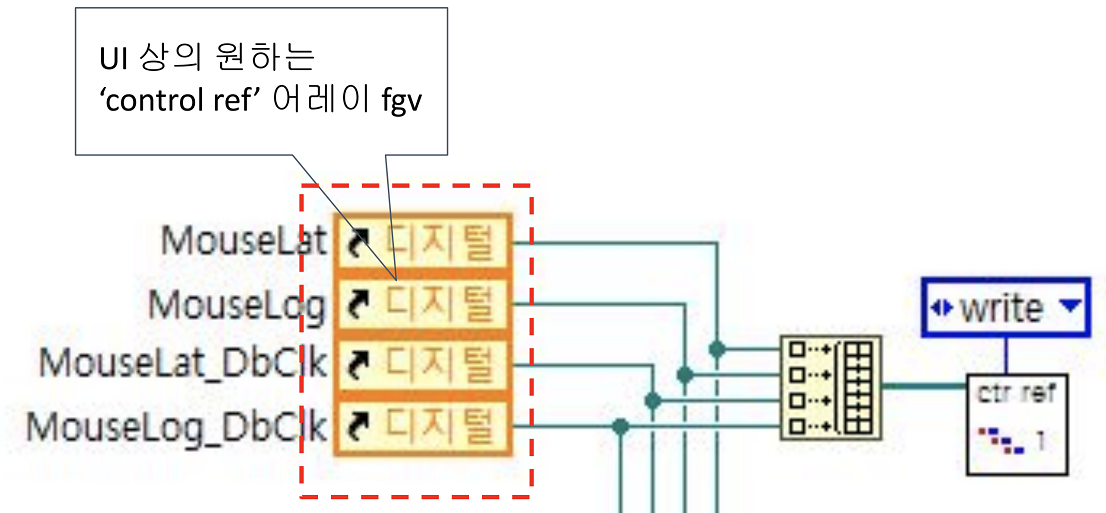 [SRC history] LabVIEW callback 함수 기능을 활용하여 지도상의 커서에 위치에 따라 실시간 위도/경도 값 표시.
[SRC history] LabVIEW callback 함수 기능을 활용하여 지도상의 커서에 위치에 따라 실시간 위도/경도 값 표시.
기본으로 제공하는 예제의 기능 중에는 LabVIEW callback 함수 중에 마우스 커서의 움직임과 연동하여 커서의 위치에 따라 실시간으로 위도/경도 가표시 되는 기능을 확인 할 수 있음.
추가 검토기능
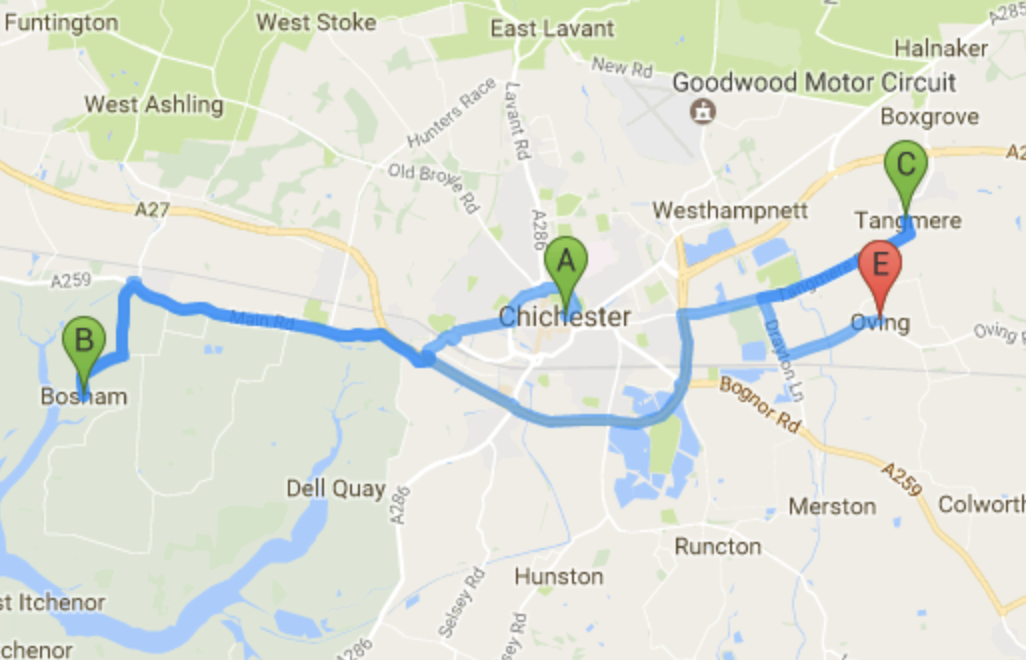 The Next SRC 추가 보완기능으로 검색 및 경로표시 등의 기능적용을 검토 중입니다.
The Next SRC 추가 보완기능으로 검색 및 경로표시 등의 기능적용을 검토 중입니다.
현재는 포함하지 않은 검색, 경로표시 등의 기능에 대해서도 추가 검토 중 입니다.
응용
 다양한 목적의 위치표시
다양한 목적의 위치표시
자율주행 이외에도 다양한 로봇, 실외 알람위치 표시, 측정데이타 위치표시 등의 목적으로 유용하게 활용가능.
Ybbaek
테스트자동화 엔지니어를 시작으로 반도체,자동차,국방,가전 등의 분야에 성능평가와 검사자동화 시스템등을 구축한 경험을 바탕으로 현재는 모바일 자율주행 로봇을 개발하고 있습니다.

Comments