차량제어는 Python, C, 등의 컴퓨터언어와도 호환이 되도록 시리얼통신으로 제어할 수 있습니다. LabVIEW 라고하는 National Instrument 사의 프로그래밍 언어도 지원합니다.
모델구분 및 특징
SRC (Self driving Remote control Car) 는 자율주행 차량의 영어 약자 이면 현재 SRC-A,B,C,D 등의 타입이 있습니다.
타입별 차이는 크기, 속도, 모터토크 등으로 구분되어 나누어 집니다.
개발시간 전체 약 10여년. 최종 전체 금속기반의 구조는 2019년 완성
SRC B1
항목
스펙
참고
모터
12V DC motor
속도:8000rpm, 전류: 1.3~7.2A, 감속비 19
동작시간
2.5 hour
배터리 기본사양 시
상위제어기
미니 Fanless PC
선택가능
하위제어기
아두이노
나노 USB 연결
휠
4.0인치
통고무 바퀴
카메라
일반 웹캠
USB webcam
GPS
NMEA 출력 Netwrok RTK 옵션
상세사양은 변동가능
최대속도
0.8m/s
Dual motor 옵션시 약 1.8m/s
차량크기
430x190x240
라이다 포함시 높이->250mm
주요특징
프레임은 전체가 알루미늄, 철 등의 금속. 일반 휴대용 보조배터리 파워로 일반 USB 충전이 가능하여 편리하며. 통 고무 타이어로 구성되어 펑크날 위험이 없습니다. (source), 구조와 강성이 상당히 개량되어 전체적인 안정성은 일반 플라스틱 RC 카에 비할 수 없고, 현재 수십 km 실외 운행으로 내구성 검증도 완료:
개발시간 전체 약 10여년. 최종 전체 금속기반의 구조는 2019년 완성
모듈/센서
개별 모듈들의 구성은 맞춤형으로 제공 될 수 있으며, 기본 모터와 모터드라이버, 상위제어기(아두이노) 만으로도 제공이 되며 제어명령은 USB 을 통한 시리얼 통신으로 제어가 가능합니다..
Full option 상태의 센서 및 기타 모듈 구성도
산업용 Laser 장착사진
추가 확장 배터리 장착사진 - 주행시간 6시간 이상으로 연장
실제차량에 사용하는 양산용 카메라 마운트 사진1
실제차량에 사용하는 양산용 카메라 마운트 사진2
일반 웹캠 3개 장착 사진
주행알고리즘
기본으로 제공하는 SRC/ASV 로봇의 주행 로직은 Pure pursuit 로직과 PID 로직을 조향제어 로직에 연결하여 제어하고 있습니다.
PID % Pure pursuit 로직 반영
사용자 화면 (Main UI)
고등학교 등 트랙에 주행 셋업
튜닝/ 업그레이드
각 SRC 모델에 (A,B,C,D) 에 속도, 토크를 2배로 향상할 수 있는 듀얼모터 (Dual moter) 옵션 가능.
프레임 강성을 유지하기 위해 보완 패치들로 접속부분 추가 체결.
모바일 로봇의 종류는 기본 SRC 차량모델에 이어 ASV 보트(선박) 모델도 있으며 교육목적의 Pendulum, Ball Balance robot 등도 있습니다.
강화학습 적용 플랫폼
모든 RLmodel 로봇들은 강화학습을 적용하고 테스트 해볼 수 있는 목적으로 개발이 시작되었으며 현재도 다양한 접근으로 예제들을 검토 중입니다.
기타 편의사항
SRC 차량은 간단한 시리얼 프로토콜 제어가 가능하고 부가 기능으로는 스피커, LED dot matrix, Light 등을 옵션으로 창작하여 테스트 시 차량의 상태나 프로그램의 동작 세부사항 확인이 쉽도록 하였습니다.
Log analyzer
기본 주행시 생성되는 로그파일이 있으며 Log analyzer 를 사용하여 재생 및 이동중의 경로추종 정밀도 통계등을 확인 할 수 있습니다.
Log replay 는 실행파일로 제공되는 툴이며 기능은 아래와 같습니다.:
다중 경로파일 선택 가능 / waypoint files (TM, gpx)
GPS/GNSS 모듈제조사 완 상관없이 사용 (단, NMEA format 이어야 함)
구글맵 연동하여 replay / Google map synch
평가항목: +/- 오차 최대/최소/평균, 전체이동거리, 총 waypoint 거리 등
Ybbaek
테스트자동화 엔지니어를 시작으로 반도체,자동차,국방,가전 등의 분야에 성능평가와 검사자동화 시스템등을 구축한 경험을 바탕으로 현재는 모바일 자율주행 로봇을 개발하고 있습니다.
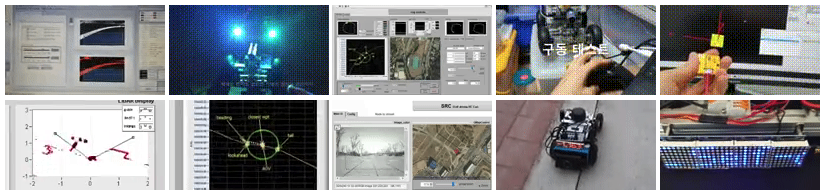 다양한 HW 및 SW 모듈로 주행알고리즘 검증 및 센서퓨전 테스트에 적용완료
다양한 HW 및 SW 모듈로 주행알고리즘 검증 및 센서퓨전 테스트에 적용완료 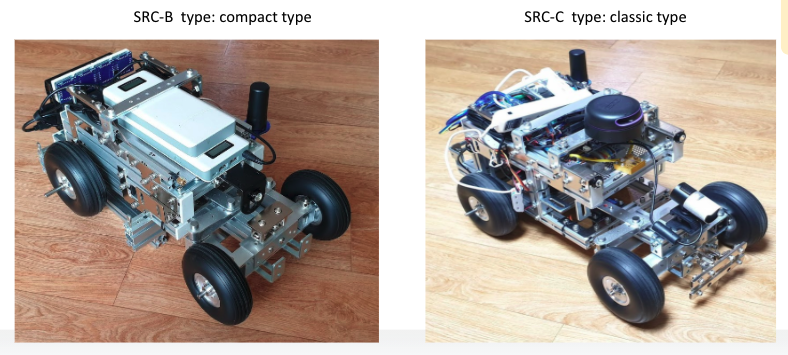 개발시간 전체 약 10여년. 최종 전체 금속기반의 구조는 2019년 완성
개발시간 전체 약 10여년. 최종 전체 금속기반의 구조는 2019년 완성 개발시간 전체 약 10여년. 최종 전체 금속기반의 구조는 2019년 완성
개발시간 전체 약 10여년. 최종 전체 금속기반의 구조는 2019년 완성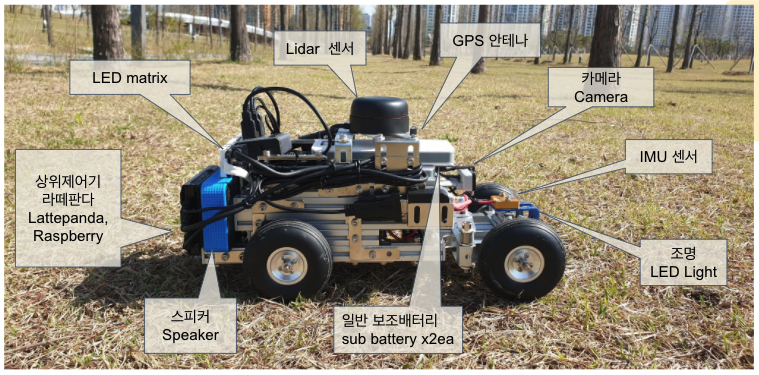 Full option 상태의 센서 및 기타 모듈 구성도
Full option 상태의 센서 및 기타 모듈 구성도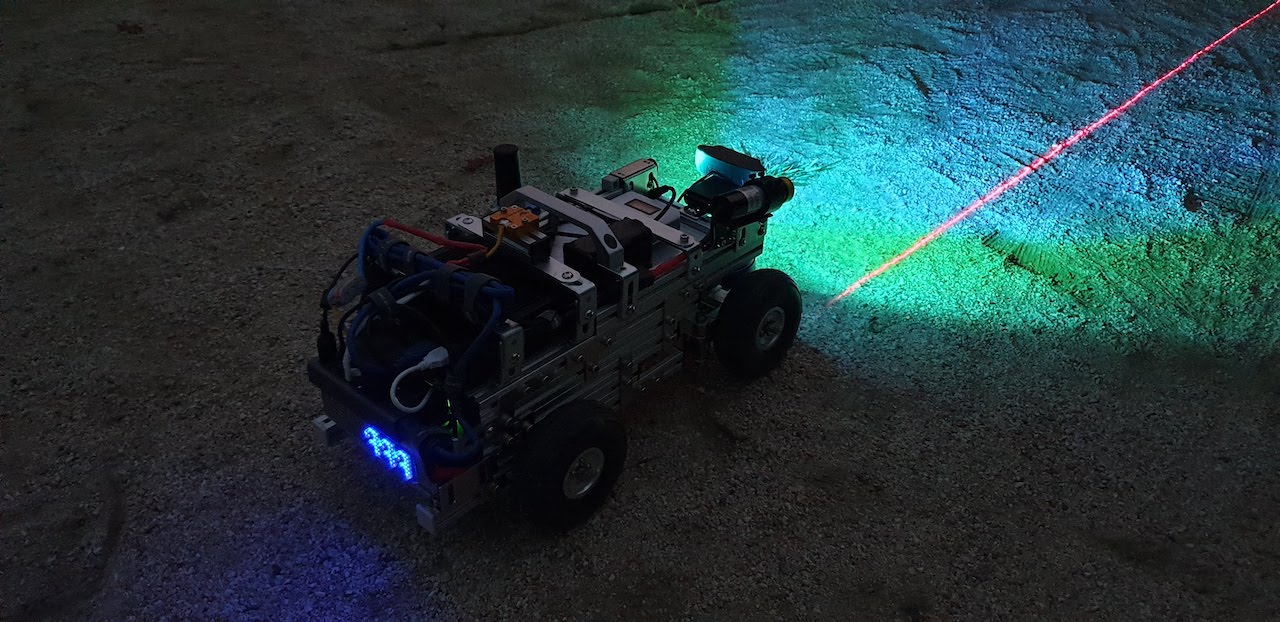 산업용 Laser 장착사진
산업용 Laser 장착사진 추가 확장 배터리 장착사진 - 주행시간 6시간 이상으로 연장
추가 확장 배터리 장착사진 - 주행시간 6시간 이상으로 연장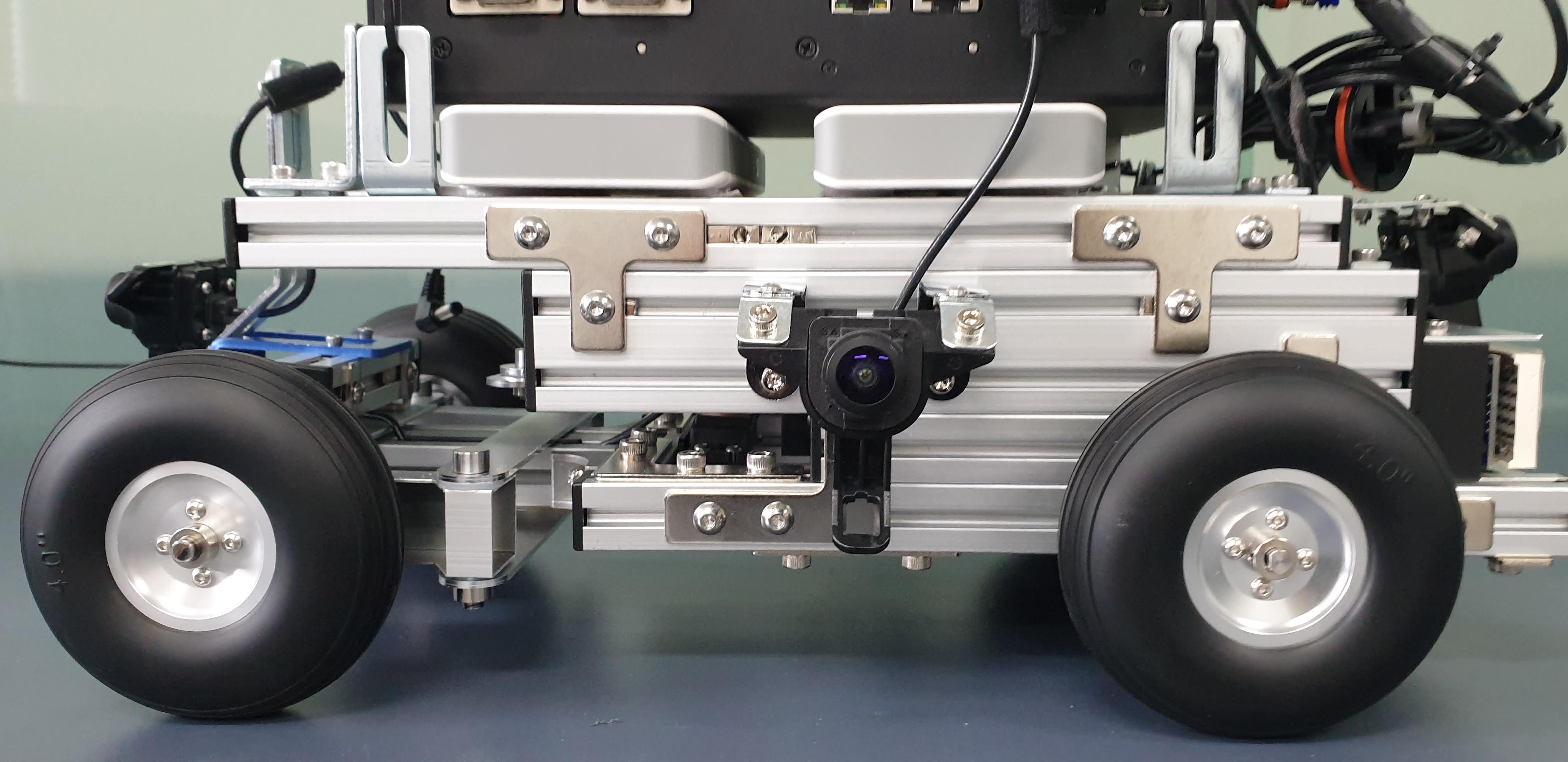 실제차량에 사용하는 양산용 카메라 마운트 사진1
실제차량에 사용하는 양산용 카메라 마운트 사진1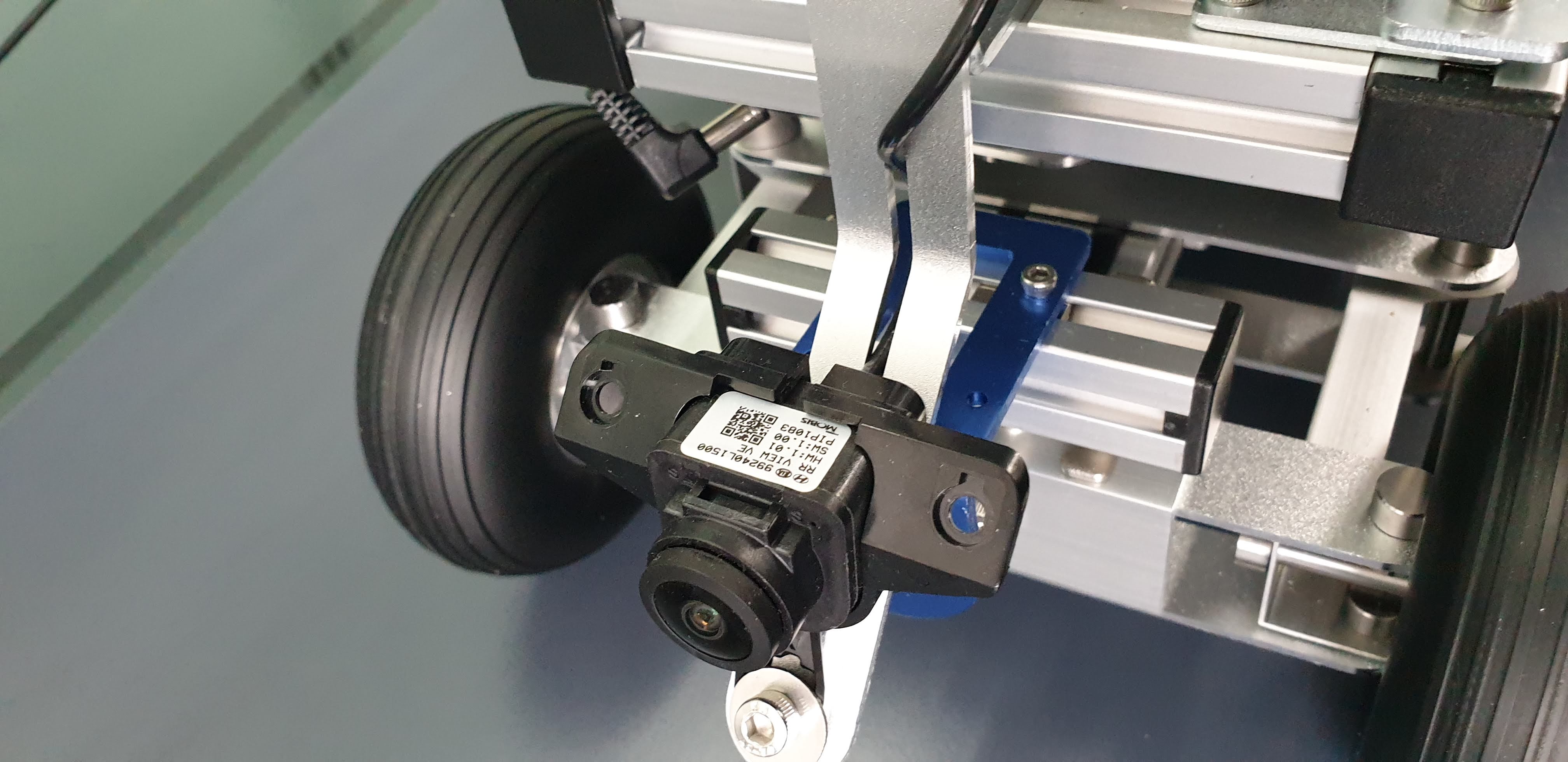 실제차량에 사용하는 양산용 카메라 마운트 사진2
실제차량에 사용하는 양산용 카메라 마운트 사진2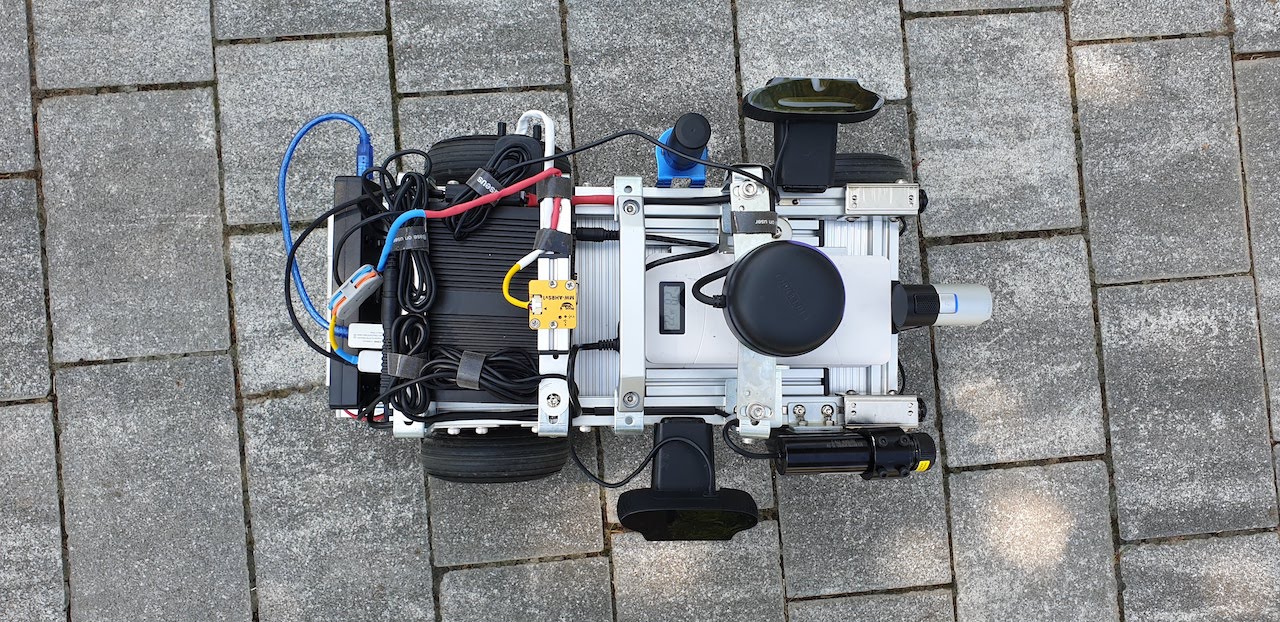 일반 웹캠 3개 장착 사진
일반 웹캠 3개 장착 사진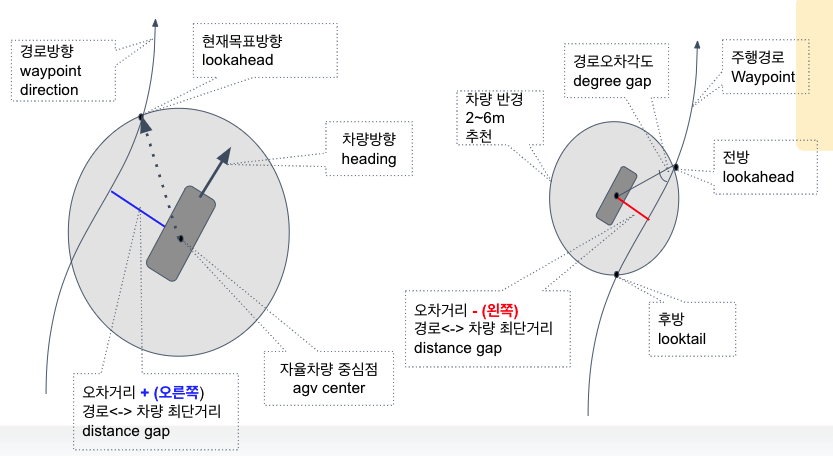 PID % Pure pursuit 로직 반영
PID % Pure pursuit 로직 반영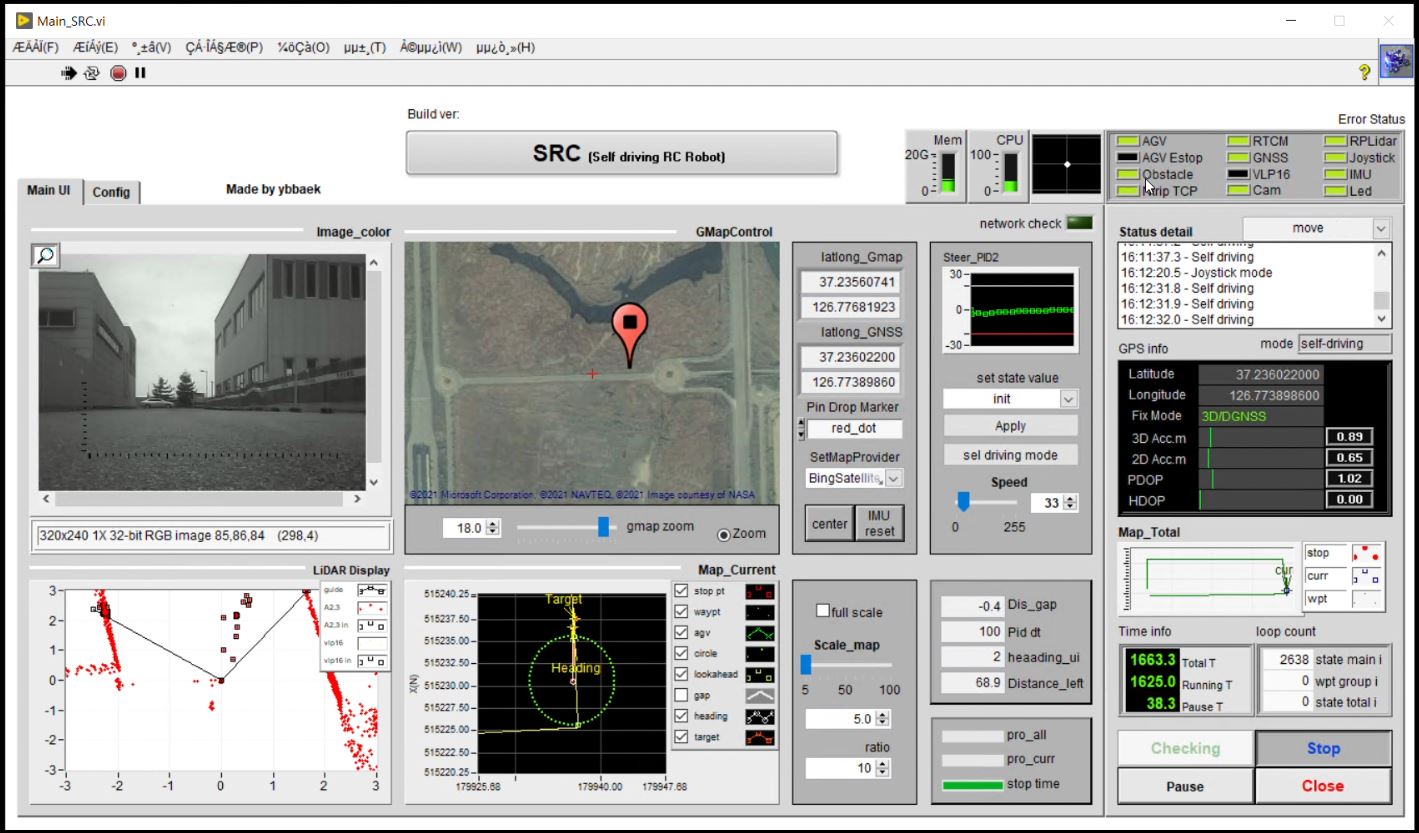 사용자 화면 (Main UI)
사용자 화면 (Main UI) 고등학교 등 트랙에 주행 셋업
고등학교 등 트랙에 주행 셋업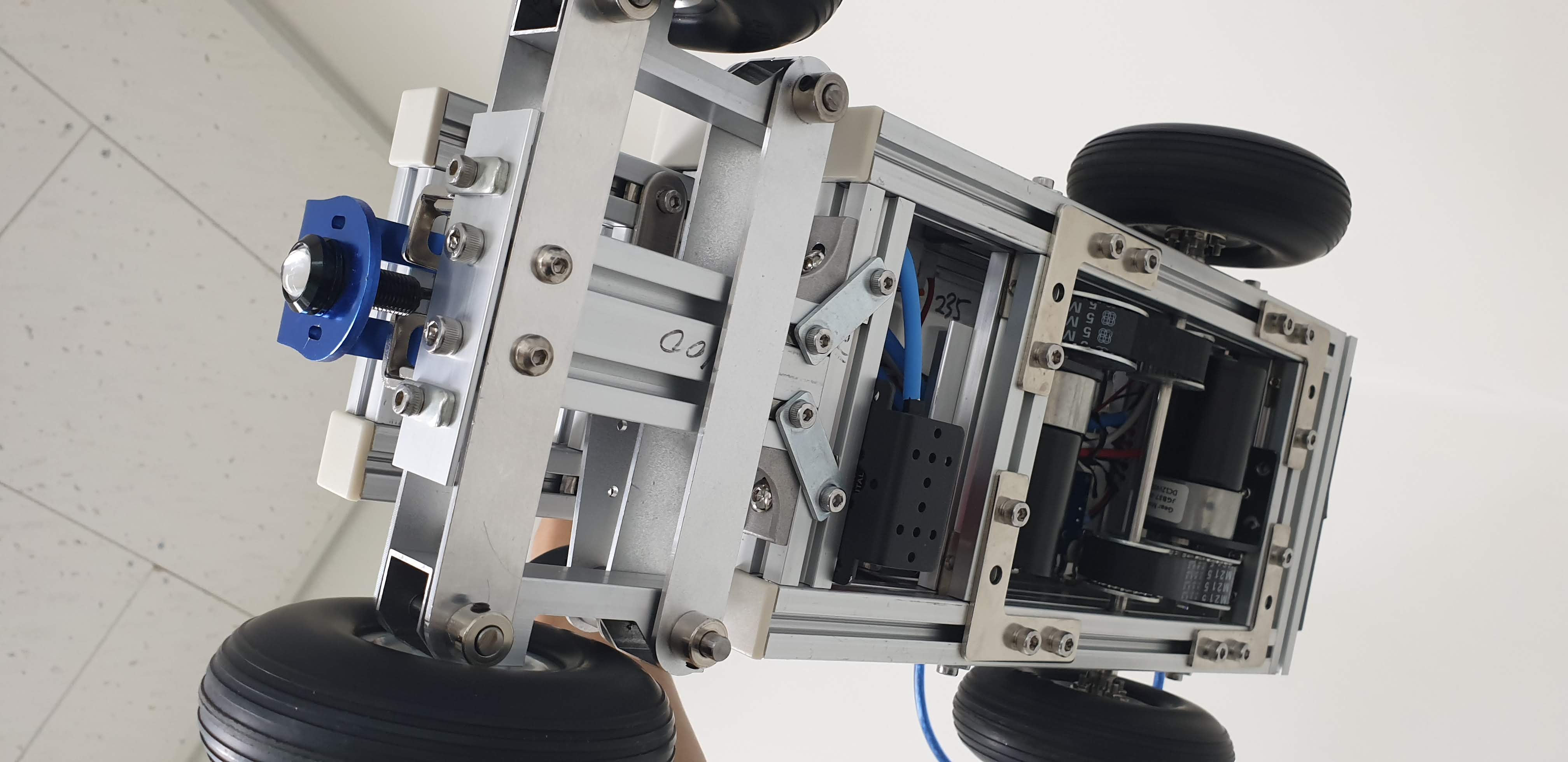


Comments