기본기능
알엘모델 SRC-D Smart farm 버전의 목적은 실내외 특히 야외에 있는 농작물의 다양한 발육상태, 이상유무 등을 원격에서도 최대 4대의 카메라를 통해 확인/분석/전송을 편리하게 할 수 있게하여 더운 여름이나 오지에 가야하는 불편함을 줄여줄 수 있습니다.
상세설명
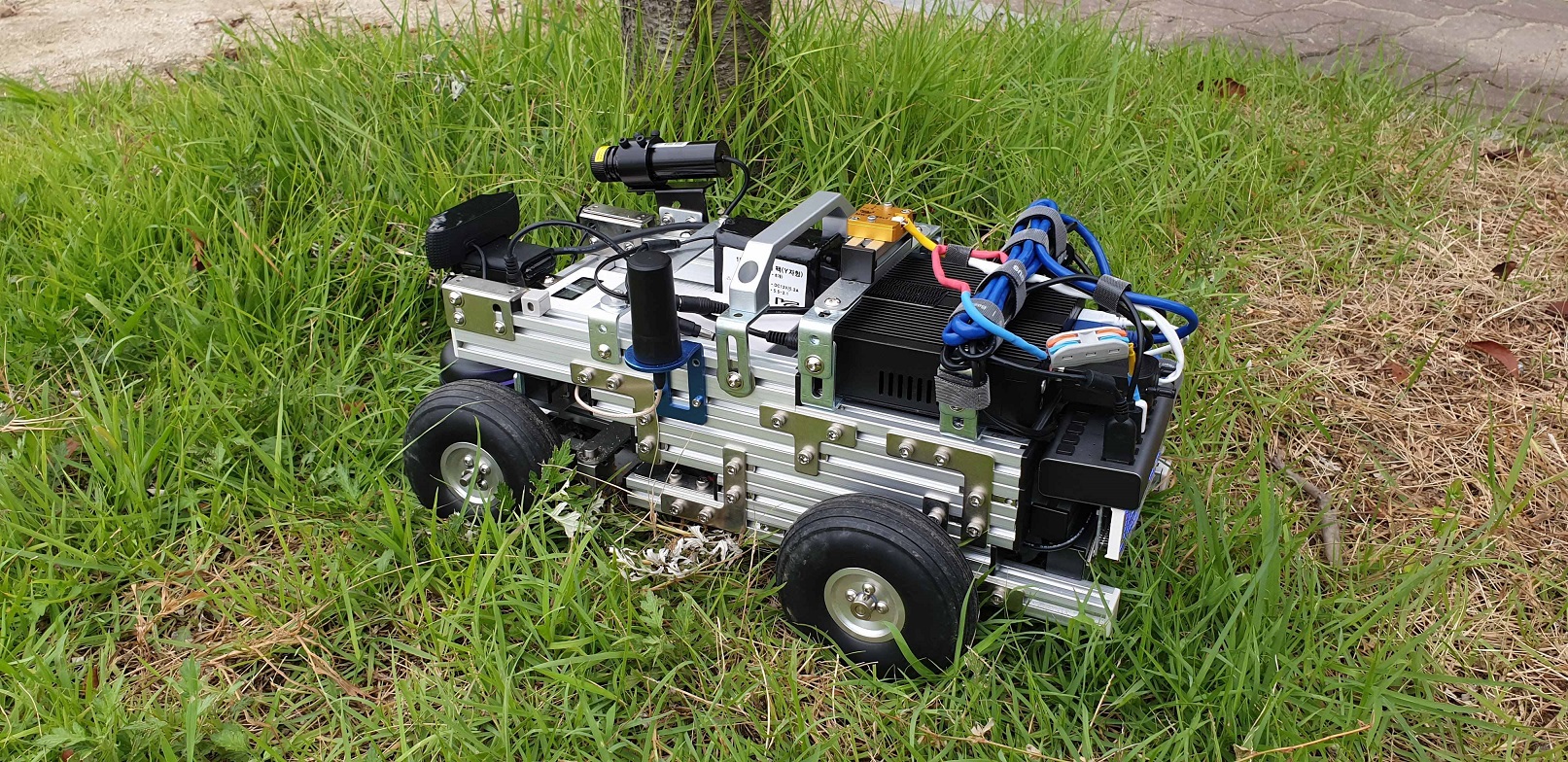
기본적으로 로봇이 이동하는 경로를 위성지도를 활용하여 설정하고 작성된 경로파일(waypoint) 을 전송하여 로봇이 기본적으로 경로를 바탕으로 GPS 기반으로 이동하여 동작하게 됩니다.
 [RLMap-UI] 야외 경작지 이동화면.
[RLMap-UI] 야외 경작지 이동화면.
 [RLMap-prj] 다양한 환경의 오프로드 테스트 진행.
[RLMap-prj] 다양한 환경의 오프로드 테스트 진행.
주행설정/분석
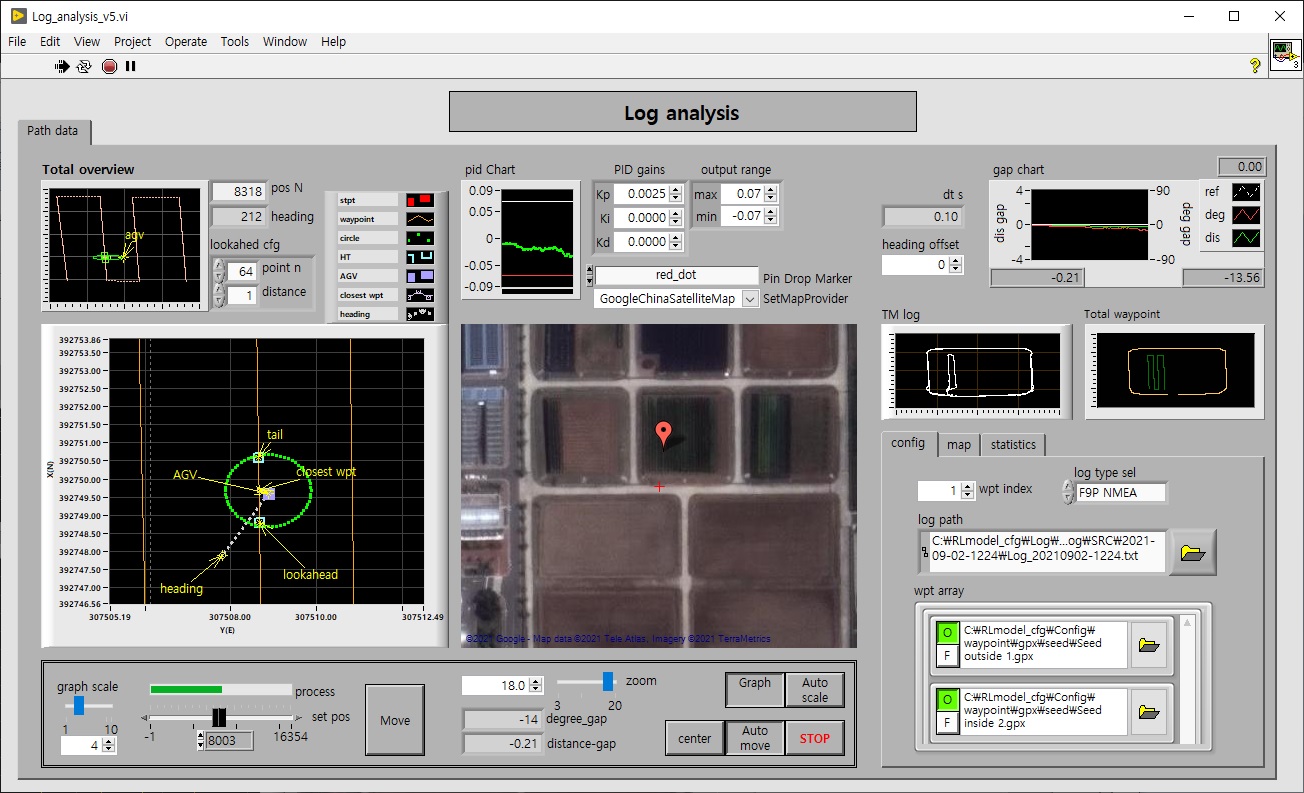 [log file] 주행후 로그파일을 분석하여 경로확인 및 평가.
설정된 경로확인 및 실제주행 경로와의 비교. 그리고 전체 경로의 정밀도 제어값 등 다양한 정보들을 다시 분석하고 확인 할 수 있는 SW로 준비되어 있습니다.
[log file] 주행후 로그파일을 분석하여 경로확인 및 평가.
설정된 경로확인 및 실제주행 경로와의 비교. 그리고 전체 경로의 정밀도 제어값 등 다양한 정보들을 다시 분석하고 확인 할 수 있는 SW로 준비되어 있습니다.
센서모듈 추가/선택
 [Map provider] ex) Street4U 화면.
기본 장착되어 있는 카메라,라이다, GPS, 등의 센서를 변경하거나 추가하여 기능을 보완이 가능.
[Map provider] ex) Street4U 화면.
기본 장착되어 있는 카메라,라이다, GPS, 등의 센서를 변경하거나 추가하여 기능을 보완이 가능.
부가기능
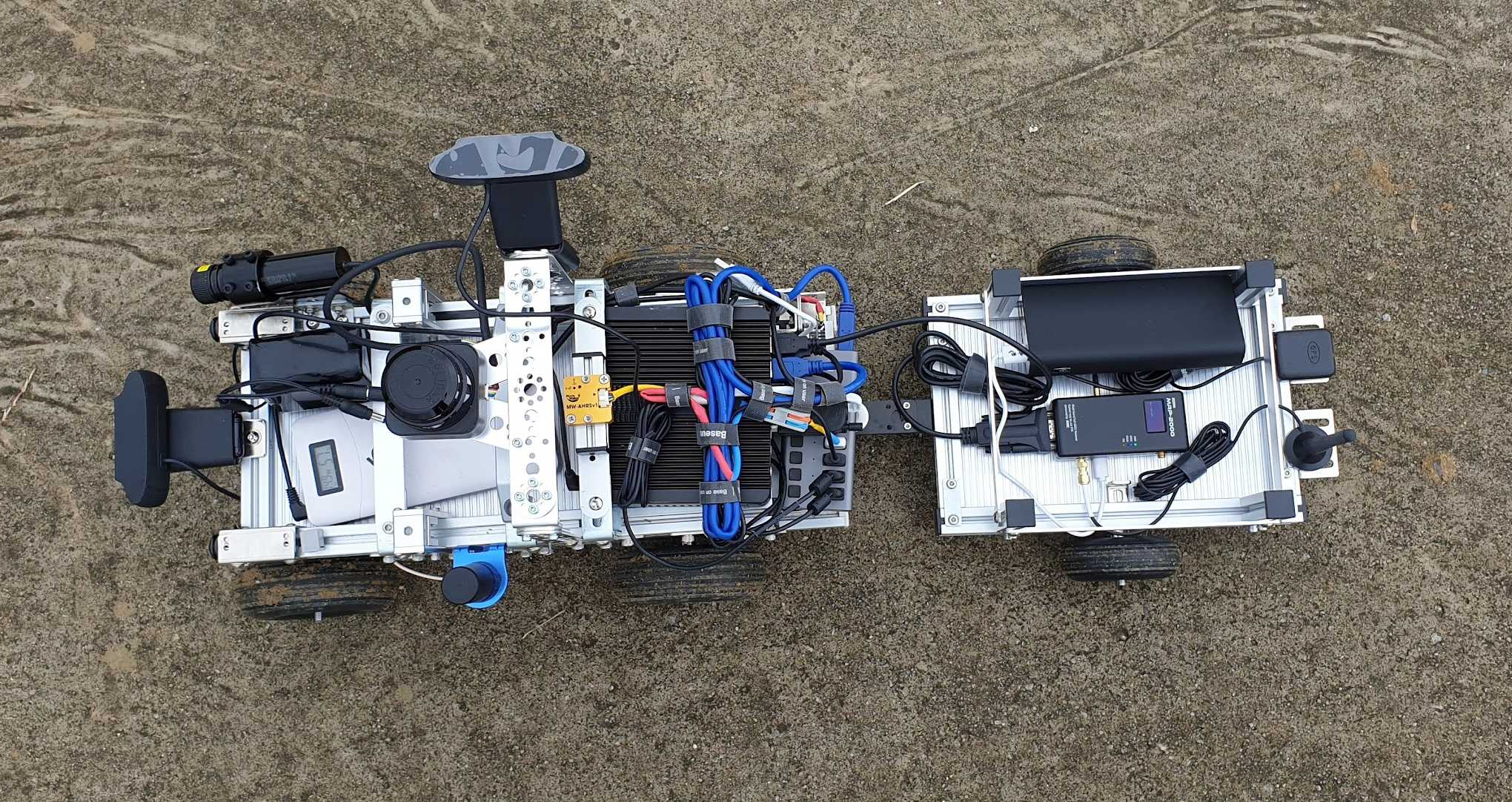 [SRC history] 모바일 로봇에 별도의 trailer 를 추가장착한 사진.
트레일러를 추가하여 배터리 확장을 비롯한 추가 장비나 물품을 실을 수 있음.
[SRC history] 모바일 로봇에 별도의 trailer 를 추가장착한 사진.
트레일러를 추가하여 배터리 확장을 비롯한 추가 장비나 물품을 실을 수 있음.
검토기능
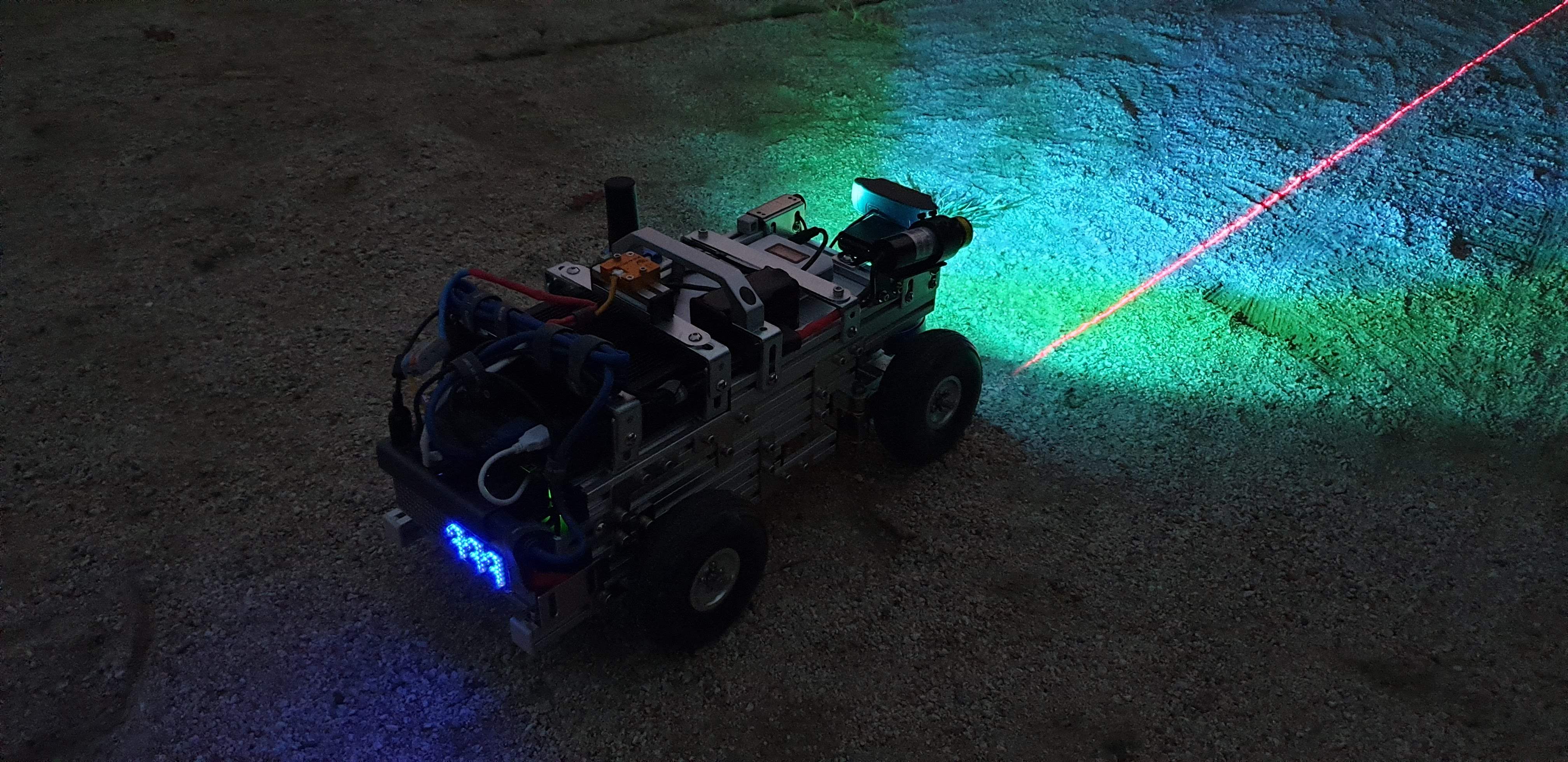 The Next SRC 추가 장착레이져.
참고로 산업용 레이져를 추가하여 직진성, 라이다 감지거리 등을 확인하여 테스트 할 수 있도록 하였 추가 검토 중 입니다.
The Next SRC 추가 장착레이져.
참고로 산업용 레이져를 추가하여 직진성, 라이다 감지거리 등을 확인하여 테스트 할 수 있도록 하였 추가 검토 중 입니다.
응용
 다양한 목적의 위치표시
자율주행에 의한 모니터링 이외에도 간단한 잡초제거, 대기질 측정, 방역 등의 기능으로 응용이 될 수 있습니다.
다양한 목적의 위치표시
자율주행에 의한 모니터링 이외에도 간단한 잡초제거, 대기질 측정, 방역 등의 기능으로 응용이 될 수 있습니다.
Ybbaek
테스트자동화 엔지니어를 시작으로 반도체,자동차,국방,가전 등의 분야에 성능평가와 검사자동화 시스템등을 구축한 경험을 바탕으로 현재는 모바일 자율주행 로봇을 개발하고 있습니다.

Comments