Testing Path planning algorithms
다양한 Path planning 알고리즘들을 테스트 하고 적용하고 있습니다.소스는 Python robotics 의 소스코드를 바탕으로 하였습니다.
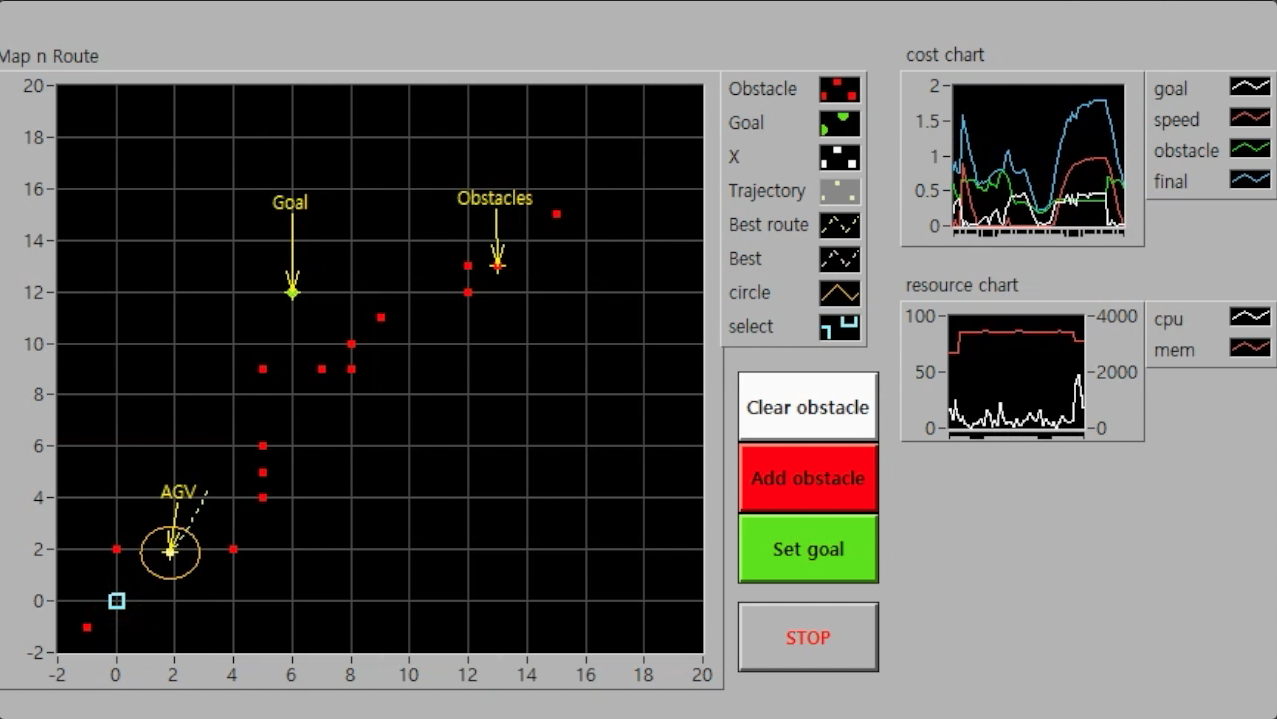
Dynamic Window Approach
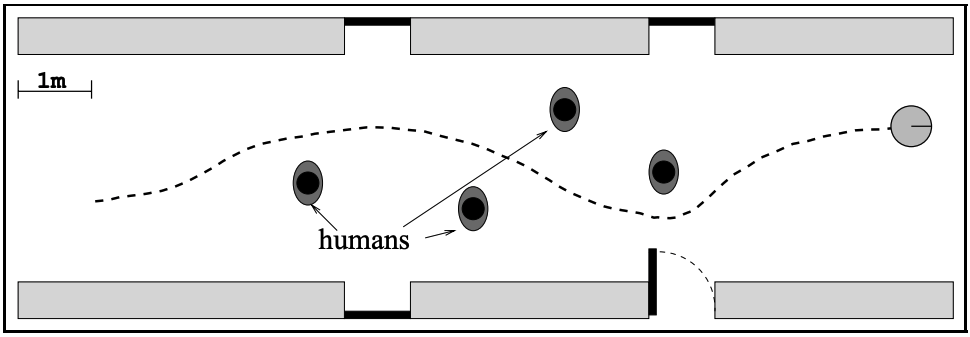
A Dynamic Window Approach 는 실시간으로 정해진 윈도우 영역의 cost 를 계산하여 경로를 계산하고 판단하는 알고리즘.
The neuron has 3 inputs and weights to calculate its output:
cost 1 is the goal distance of the agv,cost 2 is the speed of the agv,cost 3 is the obstacles distanceThe 현재 AGV의 속도, Goal 까지의 거리, 장애물들 과의 거리 등을 실시간으로 설정 영역안의 궤적들로 계산하여 최적 경로를 판단하여 이동.
해당로직은 Python Robotics 의 파이썬 로직을 약간 수정하여... read more

Comments